

 Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Датчик угловой скорости (ДУС) служит для измерения угловой скорости КА от 0,001 до 10 с-1 в инерциальном пространстве. Для этой цели можно применять как двухстепенные, так и трехстепенные гироскопы. Гиротахометр (рис. 2.2) представляет собой обычно гироскоп с двумя степенями свободы и жесткой отрицательной обратной связью, которая создает противодействующий момент, пропорциональный угловому отклонению рамки от исходного положения для получения приемлемых переходных процессов применяются специальные демпферы; если гироскоп помещается в поплавок, то демпфирование осуществляется жидкостью [1, 21].
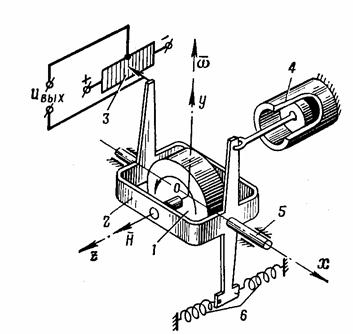
Рис. 2.2 - Кинематическая схема гиротахометра:
1 – ротор; 2 – рамка; 3 – датчик сигнала; 4 – демпфер; 5 – цапфа выходной оси; 6 – пружины; Н – кинетический момент гироскопа.
Величина момента сухого трения М0, определяет порог чувствительности гироскопа по отношению к измеряемой скорости. В поплавковых гироскопах момент М0 пренебрежимо мал. Поэтому в установившемся режиме угол поворота рамки относительно ее оси [21]

Кпр – приведенная жесткость пружины.
ГИВУС включает в себя шесть измерителей с некомпланарным расположением осей чувствительности (измерительных осей).
Все шесть измерительных осей (![]() ) при
номинальном положении располагаются параллельно ребрам базового правильного
шестигранника, вписанного в конус вращения с углом полураствора j, равным 0,9553 рад, и имеющего симметричное
расположение ребер по кругу основания конуса с угловым шагом q, равным 1,04 рад [21].
) при
номинальном положении располагаются параллельно ребрам базового правильного
шестигранника, вписанного в конус вращения с углом полураствора j, равным 0,9553 рад, и имеющего симметричное
расположение ребер по кругу основания конуса с угловым шагом q, равным 1,04 рад [21].
1. В качестве приборной системы координат принимается правая ортогональная Oxпyпzп, материализованная посадочными местами на корпусе ГИВУС. Ориентация осей чувствительности ГИВУС относительно осей приборной системы координат приведена на рисунке (рис 2.3) где:
Oxпyпzп – приборная система координат ГИВУС;
![]() – положительные направления
осей чувствительности ГИВУС (измерителей А1, А2, А3,
А4, А5, А6 соответственно).
– положительные направления
осей чувствительности ГИВУС (измерителей А1, А2, А3,
А4, А5, А6 соответственно).
Оси чувствительности ![]() и
и ![]() параллельны плоскости хпОуп.
На рисунке (рис. 2.4) показаны
положительные направления углов отклонения осей чувствительности измерителей
относительно номинального положения, где
параллельны плоскости хпОуп.
На рисунке (рис. 2.4) показаны
положительные направления углов отклонения осей чувствительности измерителей
относительно номинального положения, где
![]() – номинальные положения
осей чувствительности измерителей А1, А2, А3,
А4, А5, А6 соответственно;
– номинальные положения
осей чувствительности измерителей А1, А2, А3,
А4, А5, А6 соответственно;
Dq1, Dj1, Dq2, Dj2,…, Dq6, Dj6 – положительные углы отклонения осей относительно номинального положения.
2.
При вращении ГИВУС вокруг оси чувствительности ![]() в положительном направлении
(против часовой стрелки, если смотреть с конца вектора) выходная информация с
измерителя А1 (А2, А3, А4, А5,
А6) соответствует положительному значению параметра и наоборот.
в положительном направлении
(против часовой стрелки, если смотреть с конца вектора) выходная информация с
измерителя А1 (А2, А3, А4, А5,
А6) соответствует положительному значению параметра и наоборот.
3. Относительная ориентация осей приборной системы координат и строительной системы координат изделия такова, что ось хп совпадает с отрицательным направлением оси zизд; ось уп с положительным направлением оси хизд; zп совпадает с отрицательным направлением оси уизд.
C гивус выходная информация в дискретном виде выдается с каждого
измерителя (А1, А2, А3, А4,
А5, А6) в виде унитарного кода
– последовательности импульсов, транслируемых
в БЦВК по электрически не связанным каналам. Каждый канал информации
имеет две функциональные линии связи; по одной линии выдаются импульсы,
соответствующие положительной проекции, а по другой линии, соответствующие
отрицательной проекции угловой скорости на ось чувствительности измерителя [1,
3, 9, 21].
Рис. 2.3 - Ориентация осей чувствительности ГИВУС относительно осей приборной системы координат
Рис.2.4 - Положительные направления углов отклонения осей чувствительности измерителей относительно номинального положения
3 МАТЕМАТИЧЕСКИЕ МОДЕЛИ
3.1 Математическая модель упругого космического аппарата
Возьмем для рассмотрения космический аппарат, как абсолютно твердое тело, не содержащих каких-либо движущих масс (см. рис. 1.1) [1].
Если триэдр жестко связанных с телом осей Oxyz с началом координат в центре масс КА (связанная система координат - ССК) направить так, чтобы они совпали с главными центральными осями инерции, то центробежные моменты инерции обратятся в нуль и система уравнений Эйлера, описывающая динамику вращения КА вокруг центра масс, примет вид (3.1) [1, 3]:
 (3.1)
(3.1)
где ![]() ,
,
![]() ,
, ![]() – проекции вектора
абсолютной угловой скорости тела на оси
– проекции вектора
абсолютной угловой скорости тела на оси
Ox,Oy и Oz соответственно.
![]() ,
,![]() ,
,
![]() – проекции главного момента
М на оси Ox,Oy и Oz соответственно.
– проекции главного момента
М на оси Ox,Oy и Oz соответственно.
![]() ,
, ![]() и
и ![]() - моменты инерции тела
относительно тех же осей.
- моменты инерции тела
относительно тех же осей.
![]()
![]() (3.2)
(3.2)
![]()
В приведенных выражениях (3.2) x,y,z – координаты элементарной массы тела, а интегралы берутся по всей массе твердого тела. Космическим аппаратом целесообразней управлять вокруг ССК [1, 3, 4].
Воспользуемся гироскопическим измерителем вектора угловой скорости и рассмотрим режим построения базовой ориентации с произвольными начальными условиями [1]. Командные приборы и исполнительные органы устанавливаем с учетом главных центральных осей инерции, таким образом, что управление вокруг трех взаимно перпендикулярных осей Ox, Oy, Oz - независимо.
Наряду с динамическими уравнениями рассматриваются кинематические уравнения, связывающие угловые скорости wj с углами поворота триэдра осей Oxyz относительно триэдра осей некоторой базовой системы координат (БСК) [1, 3], начало которой совпадает с началом координат ССК, а оси определенным образом ориентированы в инерциальном пространстве и движутся поступательно.
Пусть углы ориентации (углы Эйлера-Крылова) ![]() –
полностью определяют угловое положение ССК относительно БСК. Понятие углов
ориентации становится однозначным лишь после того, как введена
последовательность поворотов твердого тела вокруг осей Ox,
Oy, Oz. Для последовательности
поворотов:
–
полностью определяют угловое положение ССК относительно БСК. Понятие углов
ориентации становится однозначным лишь после того, как введена
последовательность поворотов твердого тела вокруг осей Ox,
Oy, Oz. Для последовательности
поворотов: ![]() система кинематических
уравнений имеет вид [1, 4, 5, 23]:
система кинематических
уравнений имеет вид [1, 4, 5, 23]:
(3.3)
Системы (3.1) и (3.3) описывают угловое движение твердого тела относительно БСК. Будем предполагать, что углы Эйлера-Крылова jj малы. Текущие значения wj оцениваются в системе по информации измерителя угловой скорости, измеряющего интегралы от проекций вектора абсолютной угловой скорости КА на оси чувствительности прибора [21].
Известны также некоторые другие методы [1, 4, 23] описания конечного поворота твердого тела не тремя, а четырьмя параметрами: исследование параметров Родрига-Гамильтона, Кейли-Клейна, или с использованием кватернионов [1, 3, 6].
Интегрируя кинематические уравнения (3.3) в бортовой
цифровой вычислительной машине (БЦВМ) при начальных значениях углов ![]() , и интегрируя уравнения
движения центра масс КА при соответствующих начальных условиях, реализуют
бесплатформенную инерциальную навигационную систему (БИНС). Таким образом,
считаем, что текущие величины углов jj непрерывно вычисляются в БИНС [9, 12].
, и интегрируя уравнения
движения центра масс КА при соответствующих начальных условиях, реализуют
бесплатформенную инерциальную навигационную систему (БИНС). Таким образом,
считаем, что текущие величины углов jj непрерывно вычисляются в БИНС [9, 12].
Характерной особенностью момента управления ![]() является
активность, он появляется в результате включения вспомогательных органов (в
частности реактивных двигателей стабилизации), и исчезает при их отключении.
Момент Мупрj формируется в соответствии с логикой закона
управления и обеспечивает заданное угловое положение КА [1, 8, 10].
является
активность, он появляется в результате включения вспомогательных органов (в
частности реактивных двигателей стабилизации), и исчезает при их отключении.
Момент Мупрj формируется в соответствии с логикой закона
управления и обеспечивает заданное угловое положение КА [1, 8, 10].
Источником внешнего возмущающего момента Мвj, является
взаимодействие КА с внешней средой, приводящее к появлению действующих на
корпус внешних сил – гравитационного, аэродинамического, светового, магнитного
[1, 3, 10, 12]. Момент ![]() имеет
две составляющих –
имеет
две составляющих – ![]() (создаваемую
реактивными двигателями), и
(создаваемую
реактивными двигателями), и ![]() (создаваемым
моментным магнитоприводом и др. Будем рассматривать только
(создаваемым
моментным магнитоприводом и др. Будем рассматривать только ![]() ) [1].
) [1].
Важным свойством динамической системы ориентации является: если осями ориентации являются поступательно движущиеся оси, то при соответствующем законе управления вместо сложных пространственных поворотов космического аппарата можно изучать три независимых плоских угловых движения, что мы и сделаем в системе, т.е.:
 (3.4)
(3.4)
получено три независимых уравнения.
Закон управления формируется путем сложения позиционного сигнала jj и скоростного сигнала wj, умноженного на коэффициент усиления kj (j=x, y, z):
![]() . (3.5)
. (3.5)
Усложним рассматриваемую модель. Для этого будем рассматривать ее как упругое тело [1, 3, 6-12]. Уравнения осцилляторов для упругой модели имеет вид:
 (3.6)
(3.6)
где ![]() - коэффициент демпфирования
для каждой отдельно взятой гармоники.
- коэффициент демпфирования
для каждой отдельно взятой гармоники.
![]() - квадрат собственной
частоты не демпфированных колебаний для каждой гармоники.
- квадрат собственной
частоты не демпфированных колебаний для каждой гармоники.
![]() - управляющий момент с
учетом возможного отказа. i = 1,2,3,4. Коэффициенты
- управляющий момент с
учетом возможного отказа. i = 1,2,3,4. Коэффициенты ![]()
![]()
![]() мы
берем из таблицы, приведенной в приложении А.
мы
берем из таблицы, приведенной в приложении А.
При нулевой правой части, мы получаем свободные колебания, зависящие от начальных отклонений, угловых скоростей и др. При ненулевой правой части мы получаем вынужденные колебания, которые накладываются на свободные колебания. Они являются затухающими со временем, в силу коэффициента демпфирования. Прототипом для данной упругой модели послужил маятник на пружинке. Рассматриваемая система является линейной [1].
3.2 Моменты внешних сил, действующие на космический аппарат
3.2.1 Аэродинамический момент
Взаимодействие корпуса [1, 3] движущегося с большой скоростью космического аппарата с разряженной атмосферой больших высот вызывает появление аэродинамических сил и моментов. Первые приводят главным образом к постепенному торможению космического аппарата и связанного с этим эволюции его орбиты, в конечном итоге приводящей к падению на поверхность планеты ее искусственных спутников. А вторые к появлению внешних моментов, иногда благотворно, а чаще неблаготворно сказывающихся на режимах ориентации.
Особенностью аэродинамического взаимодействия корпуса космического аппарата с внешней средой [1, 3] является то, что вследствие малой плотности среды длина свободного пробега молекул атмосферы не может считаться малой по сравнению с характерными линейными размерами корпуса космического аппарата. В результате соударение "отскочившей" от поверхности космического аппарата молекулы внешней среды с другой такой молекулой происходит на большом удалении от него, что позволяет считать, что каждая молекула атмосферы взаимодействует с корпусом космического аппарата независимо от других. Это приводит не к обычной в аэродинамике схеме обтекания тела сплошной среды, а к картине "бомбардировки" такого тела отдельными молекулами.
Взаимодействие молекул разряженной среды с поверхностью твердого тела мыслимо идеализировать двояким образом: либо как упругое соударение с мгновенным зеркальным отражением молекулы, либо считать, что при соударении молекула отдает всю свою энергию телу, приходит с ним в температурное равновесие, а затем выходит во внешнее пространство с тепловой скоростью. Поскольку тепловая скорость молекулы невелика по сравнению со скоростью движения космического аппарата, последнюю схему можно считать схемой абсолютно упругого удара. Вторая из приведенных схем значительно лучше описывает наблюдаемые на практике явления и поэтому кладется в основу расчетов. Однако фактически происходят как упругие, так и неупругие соударения, и в более тонких расчетах следует учитывать долю тех и других [1, 3, 6].
Если по аналогии с обычной аэродинамикой считать, что возникающие силы взаимодействия тела и среды пропорциональны скоростному напору
 ; (3.7)
; (3.7)
где ![]() - плотность внешней среды,
- плотность внешней среды,
![]() - относительная скорость
тела и среды, то элементарная сила, действующая на площадку dS,
будет:
- относительная скорость
тела и среды, то элементарная сила, действующая на площадку dS,
будет:
 ; (3.8)
; (3.8)
здесь ![]() - некоторый коэффициент, а
- некоторый коэффициент, а
![]() - угол между внешней
нормалью к элементарной площадке dS и вектором скорости этой
площадки относительно внешней среды. Написанное соотношение является
следствием закона сохранения импульса, и легко убедиться, что для абсолютно
неупругого удара с=2.
- угол между внешней
нормалью к элементарной площадке dS и вектором скорости этой
площадки относительно внешней среды. Написанное соотношение является
следствием закона сохранения импульса, и легко убедиться, что для абсолютно
неупругого удара с=2.
Элементарный аэродинамический момент относительно центра масс
![]() ; (3.9)
; (3.9)
где r — радиус-вектор площадки dS, имеющий начало в центре масс тела, а полный момент
 ; (3.10)
; (3.10)
В последнем выражении интегрирование производится по той части поверхности
космического аппарата S,
которая омывается внешней средой при его движении.
Входящая в (3.8), а, следовательно,
и в (3.10) скорость V, строго говоря,
складывается из скорости движения центра масс ![]() и линейных скоростей элемянтарных площадок внешней поверхности корпуса
космического аппарата, связанных с его вращением
вокруг центра масс. Первое слагаемое
и линейных скоростей элемянтарных площадок внешней поверхности корпуса
космического аппарата, связанных с его вращением
вокруг центра масс. Первое слагаемое ![]() , связанное с
, связанное с ![]() , будет, поэтому
функцией конфигурации омываемой части корпуса, а,
следовательно, функцией конфигурации внешней поверхности космического аппарата
и его положения относительно вектора скорости
, будет, поэтому
функцией конфигурации омываемой части корпуса, а,
следовательно, функцией конфигурации внешней поверхности космического аппарата
и его положения относительно вектора скорости ![]() . Второе слагаемое, кроме
того, будет являться функцией угловой скорости
космического аппарата. Сравнение модуля скорости
. Второе слагаемое, кроме
того, будет являться функцией угловой скорости
космического аппарата. Сравнение модуля скорости ![]() с наибольшим возможным значением модуля линейной скорости внешней поверхности космического аппарата, порожденной его
вращением вокруг центра масс, показывает, что вторым слагаемым в задачах
активной ориентации космических аппаратов можно пренебрегать [1 ,3, 12]. Это связано как с очень
малыми угловыми скоростями, так и с относительно небольшими размерами современных
космических аппаратов. Поэтому всюду будет делаться предположение о равенстве нулю внешнего аэродинамического момента, связанного с вращением космического аппарата вокруг его центра масс. В этой же
связи скорость V в выражении (3.8) может быть
определена равенством
с наибольшим возможным значением модуля линейной скорости внешней поверхности космического аппарата, порожденной его
вращением вокруг центра масс, показывает, что вторым слагаемым в задачах
активной ориентации космических аппаратов можно пренебрегать [1 ,3, 12]. Это связано как с очень
малыми угловыми скоростями, так и с относительно небольшими размерами современных
космических аппаратов. Поэтому всюду будет делаться предположение о равенстве нулю внешнего аэродинамического момента, связанного с вращением космического аппарата вокруг его центра масс. В этой же
связи скорость V в выражении (3.8) может быть
определена равенством ![]() .
.
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15
