

 Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
25 июня 1991 года принят Закон Украины «Об охране окружающей природной среды» (редакции Закона 1993, 1996 г.). Закон определяет правовые, экономические, социальные основы охраны окружающей среды.
Задачей законодательства об охране окружающей среды является регулирование отношений в области охраны природы, использовании и воспроизводстве природных ресурсов, обеспечении экологической безопасности, предупреждения и ликвидации отрицательного воздействия хозяйственной и иной деятельности на окружающую среду, сохранение природных ресурсов, генетического фонда нации, ландшафтов и других природных объектов.
При массовом производстве мониторов нельзя не учитывать их влияние на окружающую среду на всех стадиях их «жизни» при изготовлении, эксплуатации, окончания срока службы. Сегодня действуют экологические стандарты, которые определяют требования к производству и материала. Они не должны содержать фреонов, хлоридов и бромидов (BS 7750) ТСО '95.
В стандарте ТСО '99 допускается ограничение использования кадмия в светочувствительном слое экрана дисплея и ртути в батарейках. Аппараты, тара и документация должны допускать нетоксичную переработку после использования. Международные стандарты, начиная с ТСО '92, включают требования пониженного электропотребления и ограничивают допустимые уровни мощности потребляемой энергии в неактивном режиме.
Работа на ПК типа Intel Pentium-Ill не оказывает вредного воздействия на окружающую среду. После истечения срока службы он полностью подлежит вторичной переработке. Необходимо выполнять требования стандарта ISO -14000, который определяет требования к организации производственного процесса с минимальным ущербом, для окружающей природной среды.
Ужесточение требований к производству и материалам, а также разработка новых производственных и утилизационных технологий позволяет уменьшить антропогенную нагрузку на окружающую среду.
Соблюдение приведенных правил и норм безопасности позволяет улучшить условия труда в помещении.
ЗАКЛЮЧЕНИЕ
В данной дипломной работе:
1. Разработаны и изучены математические модели: упругого космического аппарата, командных приборов (ГИВУС), исполнительных органов – двигатели стабилизации большой и малой тяги (ДБТ, ДМТ).
2. Разработан алгоритм функционирования СУО, включающий в себя: алгоритм стабилизации СУ, алгоритм идентификации отказов исполнительных органов СУ на базе субоптимального фильтра Калмана-Бьюси, алгоритм диагностики отказов чувствительных элементов ГИВУС на базе фильтра Льюинбергера, алгоритм остаточной тяги.
3. На базе разработанных алгоритмов было проведено математическое моделирование СУО с учетом моментов внешних сил (аэродинамических и гравитационных). Результаты моделирования показали высокую эффективность разработанных алгоритмов. Так идентификация ДС при остаточной тяге 15% составила - 5.3 сек, а для диагностики чувствительных элементов ГИВУС потребовалось 3 такта БЦВМ.
4. Разработанные алгоритмы имеют практическую ценность и могут в дальнейшем усовершенствоваться. Так для диагностики и контроля отказов чувствительных элементов ГИВУС, можно использовать фильтр Калмана, нейронные сети и элементы искусственного интеллекта.
.
СПИСОК ИСТОЧНИКОВ ИНФОРМАЦИИ
1. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974. - 600 с.
2. Синяков И. М. Системы управления упругими подвижными объектами. – Л.: ЛГУ, 1981. – 200 с.
3. Разыграев А. П. Основы управления полетом космических аппаратов и кораблей. – М.: Машиностроение, 1977. – 472 с.
4. Алексеев К. Б., Бебенин Г. Г. Управление космическими летательными аппаратами. – М.: Машиностроение, 1974. – 340 с.
5. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - М.: Наука, 1973. - 320 с.
6. Инженерный справочник по космической технике. Изд. 2-е, перераб. и доп. Под ред. А.В.Солодова. - М.: Воениздат, 1977. – 430 с.
7. Кузовков Н.Т. и др. Непрерывные и дискретные системы управления и методы идентификации. - М.: Машиностроение, 1978. – 222 с.
8. Колесников К.С., Сухов В.Н. Упругий летательный аппарат как объект автоматического регулирования. - М.: Машиностроение, 1974 – 266 с.
9. Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. – М.: Наука, 1992. – 280 с.
10. Киреев Н.Г. Условия полета и траектории движения беспилотных летательных аппаратов. – К.: УМК ВО, 1993. – 212 с.
11. Киреев Н.Г. Динамика полета и управление. – К.: УМК ВО, 1990.
12. Анучин О.Н., Емельянцев Г.И. Бесплатформенные инерциальные системы навигации и ориентации (БИНС и БИСО). Учебное пособие. – СПб.: ИТМО, 1995. – 110 с.
13. Киреев Н.Г. Системы управления беспилотных летательных аппаратов. – К.: УМК ВО, 1993. – 160 с.
14. Киреев Н.Г. Элементы систем управления ракет и космических аппаратов. – К.: УМК ВО, 1992.
15. Несенюк Л.П. Бесплатформенные инерциальные системы. Обзор состояния и перспектив развития // Гироскопия и навигация. - № 1 (36). – 2002. – С. 13-23.
16. Кузовков Н. Т. Модальное управление и наблюдающие устройства. – М.: Машиностроение, 1976. – 187 с.
17. Науменко К. И. Наблюдение и управление движением динамических систем. – Киев: Наукова думка, 1984. – 208 с.
18. Панов А.П. Математические основы теории инерциальной ориентации. – Киев: Наукова думка, 1995. – 280 с
19. Плаксий Ю.А., Фролов Ю.А. Алгоритм определения ориентации свободно вращающегося твердого тела с учетом его инерционных характеристик. – Харьков, 1984. – 10 с. Рук. предст. ХПИ. Деп. в УкрНИИТИ, № 1551 Ук-84 Деп.
20. Хемминг Р.В.“Численные методы для научных работников и инженеров ”: Пер с англ.:Под редакцией Р.С.Гутера .- гл. ред. физ. мат. лит. 1968. 203 с.
21. Пельпор Д.С. Гироскопические системы ориентации и стабилизации. Справочное пособие. - М.: Машиностроение, 1982, 165 с.
22. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. – М.: Машиностроение, 1982. – 216 с.
23. Евланов Л.Г. Контроль динамических систем. Изд. 2-е перераб. и доп. – М.: Наука, 1979, - 432 с.
24. Киреев Н.Г. Аппроксимация и идентификация в задачах динамики полета и управления. – К.: УМК ВО, 1992.
25. Кузнецов Ю.А, Уханов Е.В. Применение фильтра Калмана в задаче идентификации отказов двигателей стабилизации космического аппарата // Вестник НТУ ХПИ. № 19’ 2004, Харьков. – С. 121-126.
26. Техническое задание на разработку гироскопического измерителя вектора угловой скорости системы управления астрофизического модуля автоматических космических аппаратов серии «Спектр» 11014/09-97. НПП ХА, 1997.
27. Острем К.Ю. Введение в стохастическую теорию управления. Пер. с англ. С.А. Анисимова. – М.: Мир, 1973. – 320с.
28. Ширяев А.Н. Вероятность М. «Наука» 1988, 305с.
29. Дж. Ортега , У.Пул Введение в численные методы решения дифференциальных уравнений. Пер.с англ.; под редакцией А.А.Абрамова - М.;Наука.Гл.ред.физ.мат.лит.1986. 288с.
30. Макконел, К.Р. Брю С.Л. Экономикс – принципы, проблемы и политика пер. с англ. 2-ое изд. К.; Хагар-Демос 1993, 785с.
31. АтаманюкВ.Г. и др. Гражданская оборона 2-е изд.– М.: Высш. шк., 1987, - 288с.
32. Демиденко Г.П. и др. Защита объектов народного хазяйства от оружия массового поражения: Справочник –К.:Высш. шк., 1989, - 287с.
33. СНиП 2.04.05-93 Нормы проектирования. Отопление, вентиляция и кондиционирование. - М.: Стройиздат, 1994, 64 с.
34. СНиП П-4-79.
Строительные нормы и правила. Естественное и
искусственное освещение. Нормы проектирования. - М.: Стройиздат, 1980, ПО
74 с.
35. ПУЭ 87. Правила устройства
электроустановок. М.:
Энерогоатомиздат, 1987, 648 с.
36. ОНТП
24-86. Общесоюзные нормы технологического
проектирования. Определение категорий зданий и сооружений по взрыво - и
пожароопасности, -М.: Стройиздат., 1987, 128 с.
37. СНиП 2.09.02-85. Строительные нормы и правила. Производственные здания промышленных предприятий. Нормы проектирования.- М.:Стройиздат., 1986, 208 с.
ПРИЛОЖЕНИЕ А
КОЭФФИЦИЕНТЫ ОСЦИЛЛЯТОРОВ
Epsilon
| 0.06 | 0.09 | 0.16 | 0.28 |
WQi^2
| 4,80 | 7,50 | 23,70 | 80,50 |
Коэффициенты AX
| 0.00000000209 | -0.000000173 | 0.00000000157 | 0.00000000142 |
| -0.00000000209 | -0.000000173 | 0.00000000157 | 0.00000000142 |
| -0.00000000209 | 0.0000000297 | -0.00000000157 | -0.00000000142 |
| 0.00000000209 | 0.0000000297 | -0.00000000157 | -0.00000000142 |
| 0.00000000209 | -0.000000212 | 0.00000000157 | 0.00000000142 |
| -0.00000000209 | -0.000000212 | 0.00000000157 | 0.00000000142 |
| -0.00000000209 | 0.0000000688 | -0.00000000157 | -0.00000000142 |
| 0.00000000209 | 0.0000000688 | -0.00000000157 | -0.00000000142 |
Коэффициенты AY
| 0.000000421, | 0.0 | 0.0000000562 | 0.000000164 |
| 0.000000421, | 0.0 | 0.0000000562 | 0.000000164 |
| -0.000000148, | 0.0 | 0.0000000562 | 0.0000000146 |
| -0.000000148, | 0.0 | 0.0000000562 | 0.0000000146 |
| 0.000000422, | 0.0 | -0.0000000256 | 0.000000123 |
| 0.000000422, | 0.0 | -0.0000000256 | 0.000000123 |
| -0.000000367, | 0.0 | -0.0000000256 | 0.0000000862 |
| -0.000000367, | 0.0 | -0.0000000256 | 0.0000000862 |
Продолжение ПРИЛОЖЕНИЯ А
Коэффициенты AZ
| 0.0000000344 | 0.000000439, | 0.0 | 0.00000000906 |
| -0.0000000344 | 0.000000439, | 0.0 | 0.00000000906 |
| -0.0000000344 | 0.000000439, | 0.0 | 0.00000000906 |
| 0.0000000344 | 0.000000439, | 0.0 | 0.00000000906 |
| 0.0000000344 | -0.000000202, | 0.0 | 0.00000000906 |
| -0.0000000344 | -0.000000202, | 0.0 | 0.00000000906 |
| -0.0000000344 | -0.000000202, | 0.0 | 0.00000000906 |
| 0.0000000344 | -0.000000202, | 0.0 | 0.00000000906 |
ПРИЛОЖЕНИЕ Б
Результаты моделирования СУО
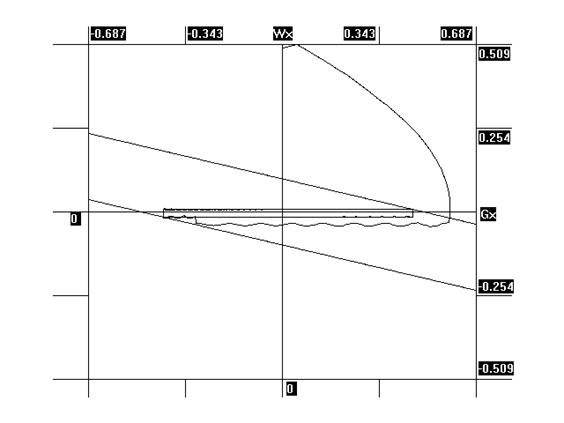
Рисунок Б.1 – Фазовый портрет, соответствующий процессу стабилизации с НУ 1-ого варианта табл. 5.1 в канале X.
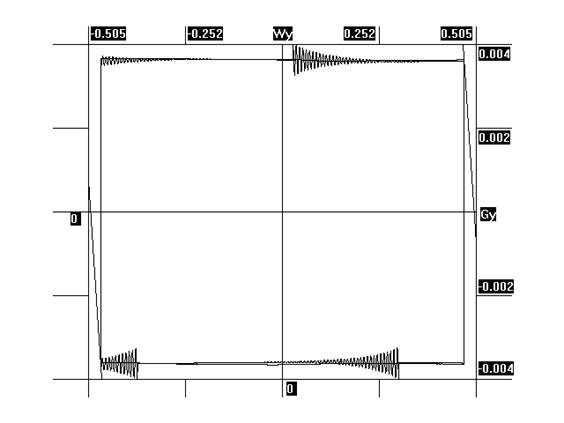
Рисунок Б.2 – Фазовый портрет, соответствующий процессу стабилизации с НУ 1-ого варианта табл. 5.1 в канале Y.
Продолжение ПРИЛОЖЕНИЯ Б
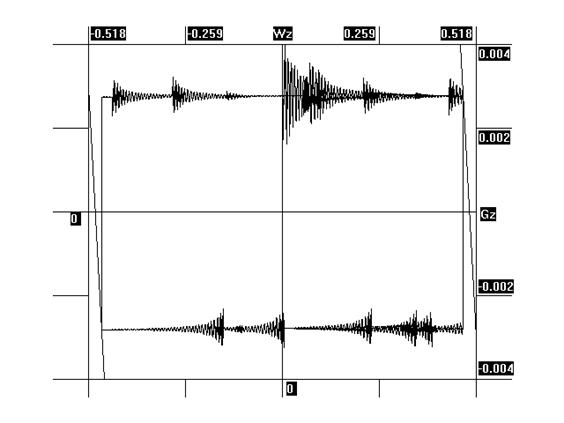
Рисунок Б.3 – Фазовый портрет, соответствующий процессу стабилизации с НУ 1-ого варианта табл. 5.1 в канале Z.
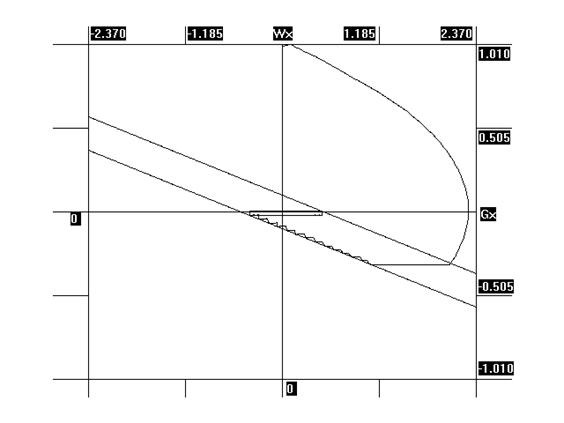
Рисунок Б.4 – Фазовый портрет, соответствующий процессу стабилизации с НУ 2-ого варианта табл. 5.1 в канале X
Продолжение ПРИЛОЖЕНИЯ Б
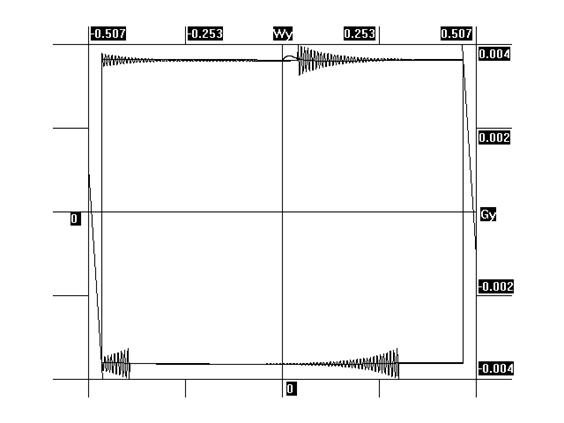
Рисунок Б.5 – Фазовый портрет, соответствующий процессу стабилизации с НУ 2-ого варианта табл. 5.1 в канале Y
 .
.
Рисунок Б.6 – Фазовый портрет, соответствующий процессу стабилизации с НУ 2-ого варианта табл. 5.1 в канале Z
Продолжение ПРИЛОЖЕНИЯ Б
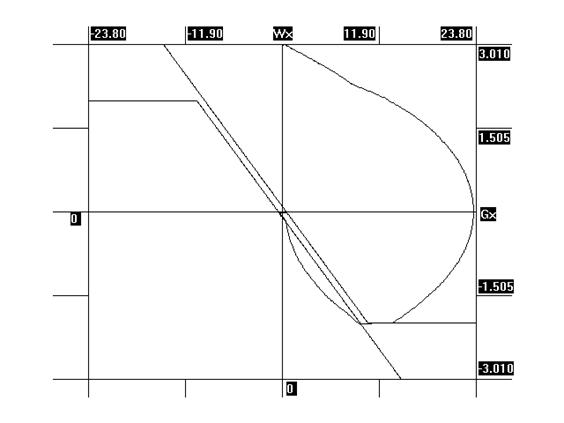
Рисунок Б.7 – Фазовый портрет, соответствующий процессу стабилизации с НУ 3-ого варианта табл. 5.1 в канале X
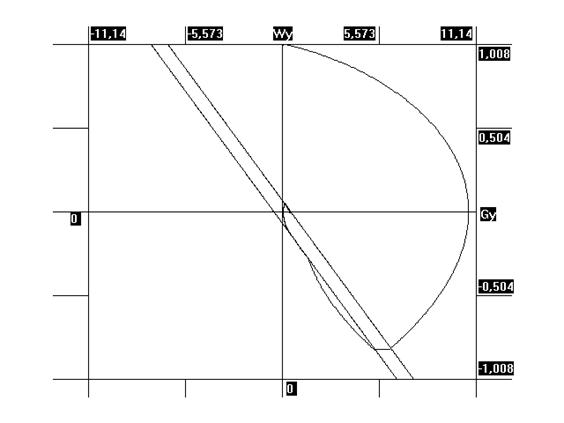
Рисунок Б.8 – Фазовый портрет, соответствующий процессу стабилизации с НУ 3-ого варианта табл. 5.1 в канале Y
Продолжение ПРИЛОЖЕНИЯ Б
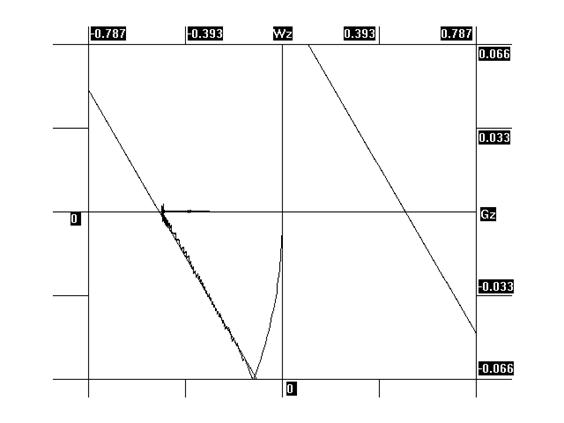
Рисунок Б.9 – Фазовый портрет, соответствующий процессу стабилизации с НУ 3-ого варианта табл. 5.1 в канале Z
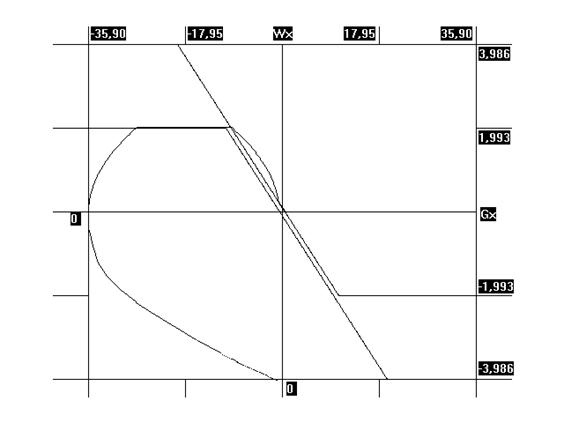
Рисунок Б.10 – Фазовый портрет, соответствующий процессу стабилизации с НУ 4-ого варианта табл. 5.1 в канале X
Продолжение ПРИЛОЖЕНИЯ Б
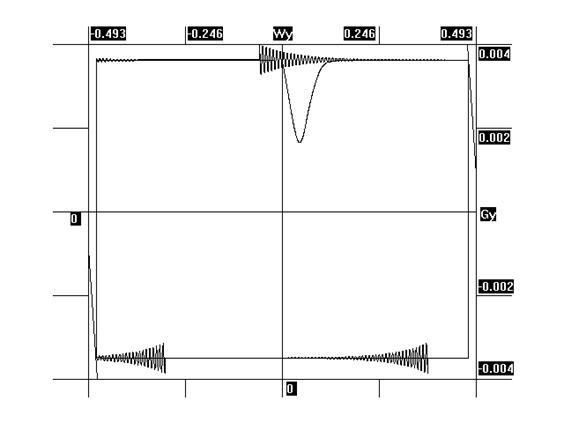
Рисунок Б.11 – Фазовый портрет, соответствующий процессу стабилизации с НУ 4-ого варианта табл. 5.1 в канале Y.
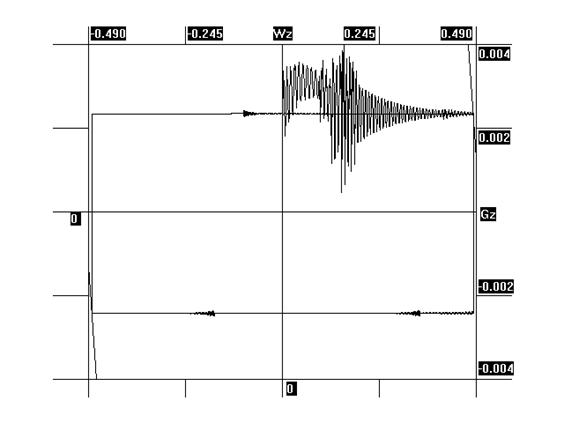
Рисунок Б.12 – Фазовый портрет, соответствующий процессу стабилизации с НУ 4-ого варианта табл. 5.1 в канале Z.
Продолжение ПРИЛОЖЕНИЯ Б
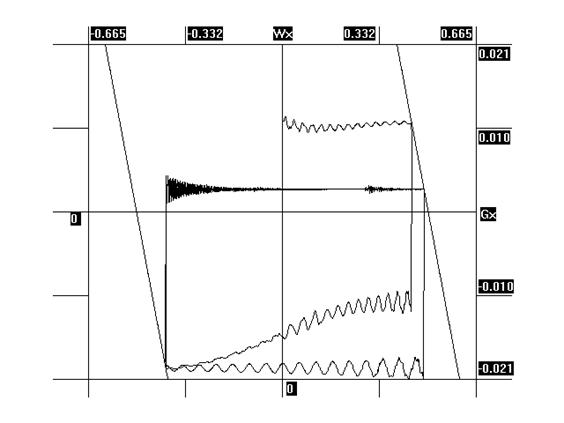
Рисунок Б.13 – Фазовый портрет, соответствующий процессу стабилизации с НУ 5-ого варианта табл. 5.1 в канале X.
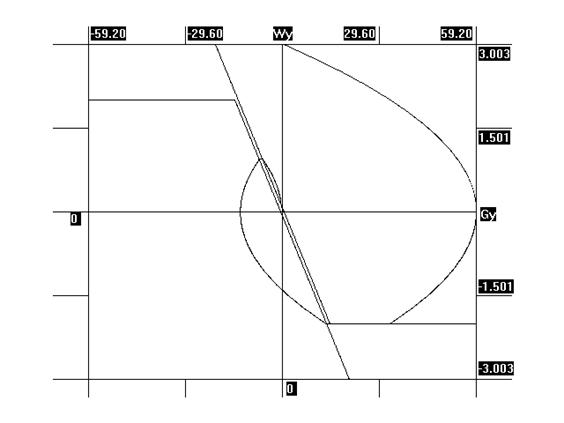
Рисунок Б.14 – Фазовый портрет, соответствующий процессу стабилизации с НУ 5-ого варианта табл. 5.1 в канале Y.
Продолжение ПРИЛОЖЕНИЯ Б
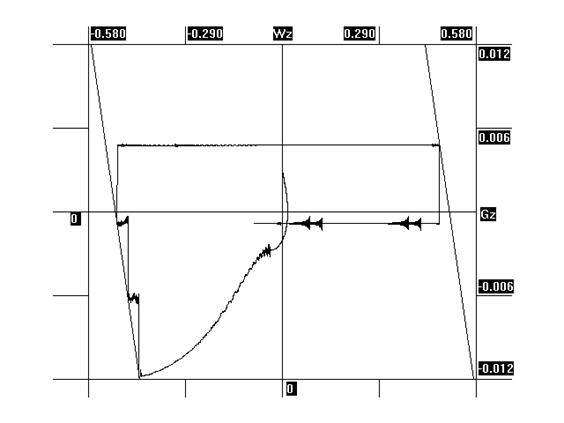
Рисунок Б.15 – Фазовый портрет, соответствующий процессу стабилизации с НУ 5-ого варианта табл. 5.1 в канале Z.
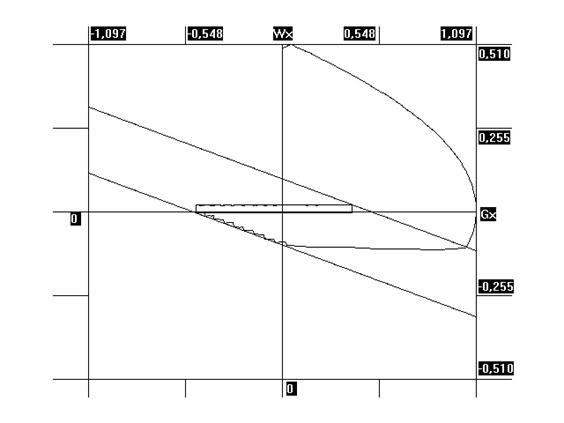
Рисунок Б.16 – Фазовый портрет, соответствующий процессу стабилизации с НУ 6-ого варианта табл. 5.1 в канале X.
Продолжение ПРИЛОЖЕНИЯ Б
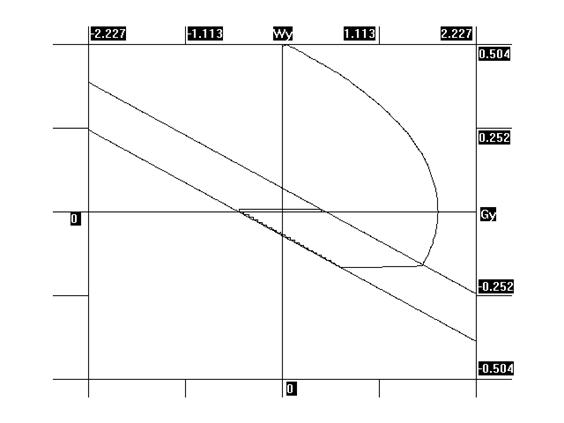
Рисунок Б.17 – Фазовый портрет, соответствующий процессу стабилизации с НУ 6-ого варианта табл. 5.1 в канале Y.
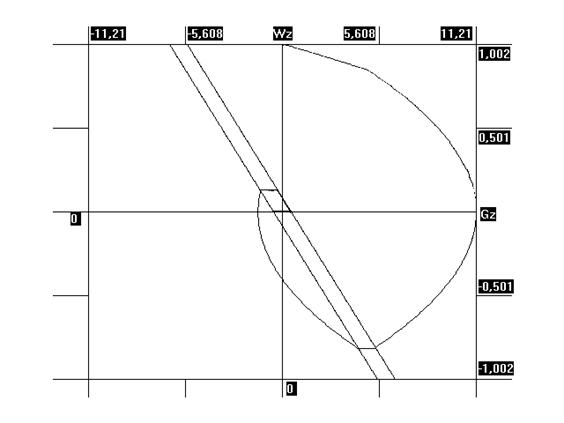
Рисунок Б.18 – Фазовый портрет, соответствующий процессу стабилизации с НУ 6-ого варианта табл. 5.1 в канале Z.
ПРИЛОЖЕНИЕ В
Результаты моделирования
Начальные условия результатов моделирования заданы в табл. 5.4
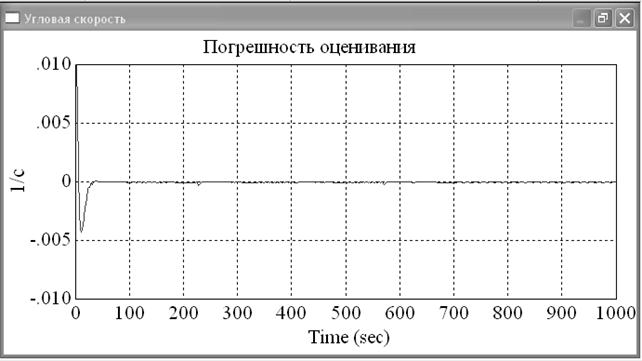
Рисунок В.1 – Погрешность оценивания, для 1-ого набора коэффициентов табл. 5.2
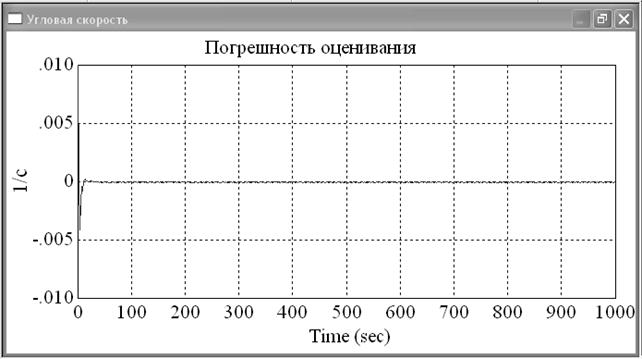
Рисунок В.2 – Погрешность оценивания, для 2-ого набора коэффициентов табл. 5.2
Продолжение ПРИЛОЖЕНИЯ В
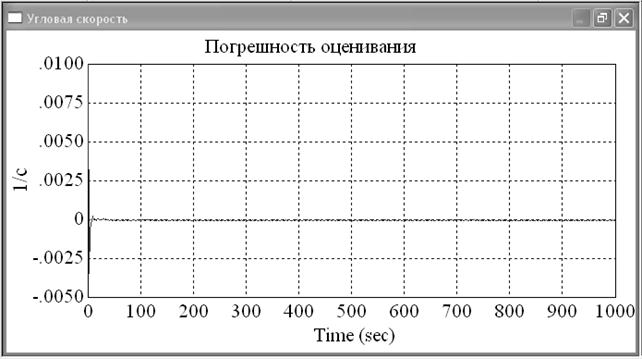
Рисунок В.3 – Погрешность оценивания, для 3-ого набора коэффициентов табл. 5.2
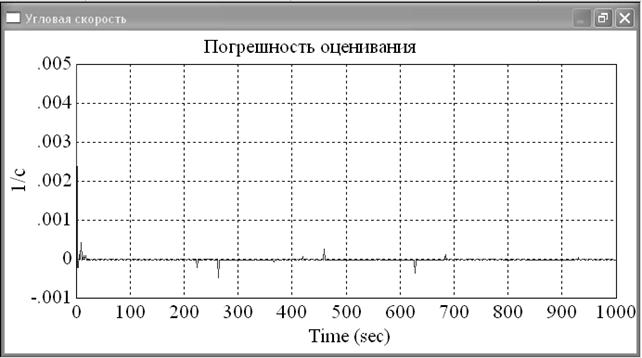
Рисунок В.4 – Погрешность оценивания, для 4-ого набора коэффициентов табл. 5.2
ПРИЛОЖЕНИЕ Г
Результаты моделирования
Начальные условия результатов моделирования заданы в табл. 5.3
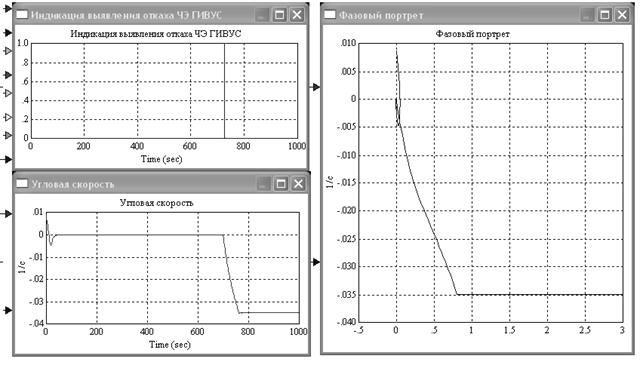
Рисунок Г.1 – диагностика отказа 2-огго типа 1-ого ЧЭ. 1-ый вариант НУ табл 5.3

Рисунок Г.2 – диагностика отказа 2-огго типа 1-ого ЧЭ. 2-ой вариант НУ табл 5.3
Продолжение ПРИЛОЖЕНИЯ Г
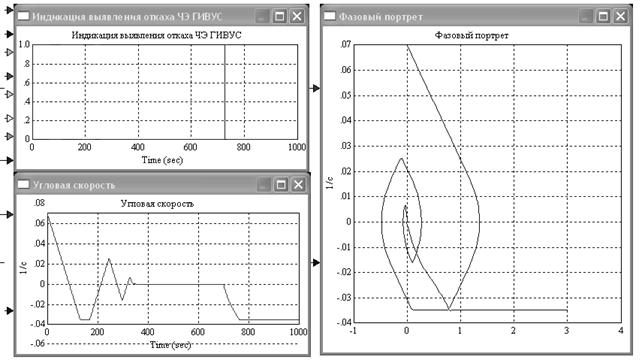
Рисунок Г.3 – диагностика отказа 2-огго типа 1-ого ЧЭ. 3-ий вариант НУ табл 5.3
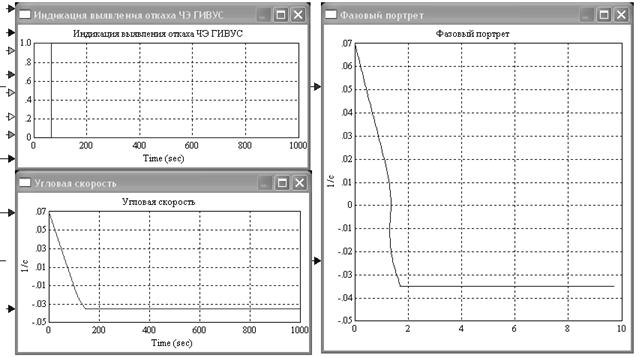
Рисунок Г.4 – диагностика отказа 2-огго типа 1-ого ЧЭ. 4-ый вариант НУ табл 5.3
Продолжение ПРИЛОЖЕНИЯ Г
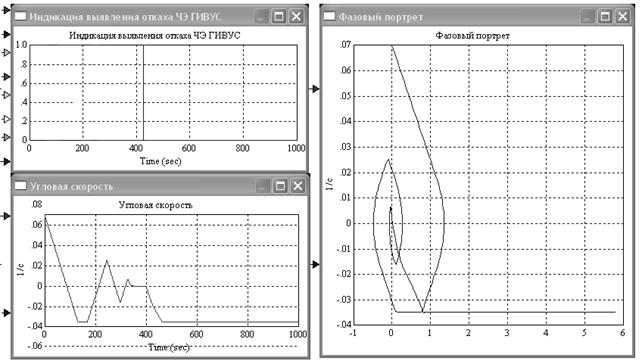
Рисунок Г.5 – диагностика отказа 2-огго типа 1-ого ЧЭ. 5-ый вариант НУ табл 5.3
ПРИЛОЖЕНИЕ Д
Результаты моделирования
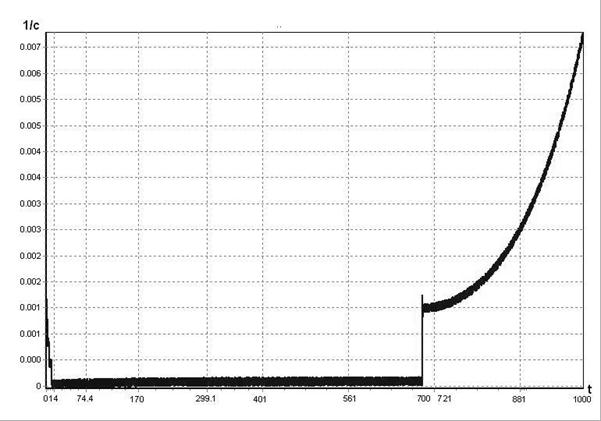
Рисунок Д.1 – Зависимость угловой скорости от времени при НУ 1-ого варианта табл 5.5
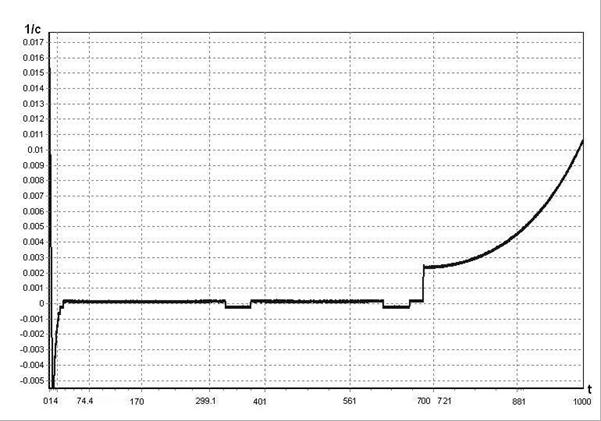
Рис. 4.2 – Зависимость угловой скорости от времени при НУ 4-ого варианта табл 5.5
Продолжение ПРИЛОЖЕНИЕ Д
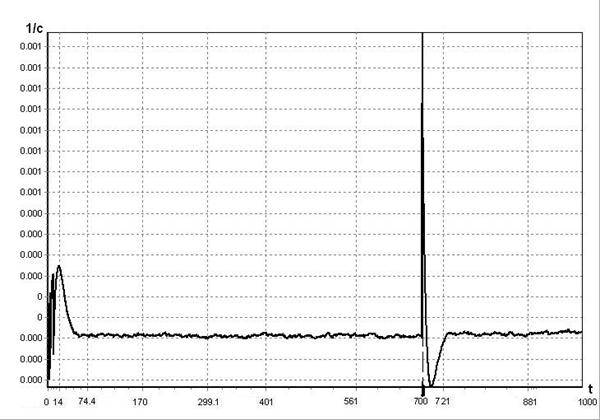
Рисунок Д.3 – Погрешность оценивания угловой скорости от времени при НУ 1-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
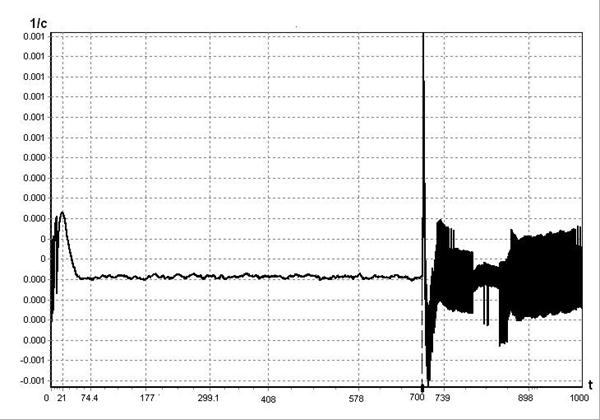
Рисунок Д.4 – Погрешность оценивания угловой скорости от времени при НУ 2-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
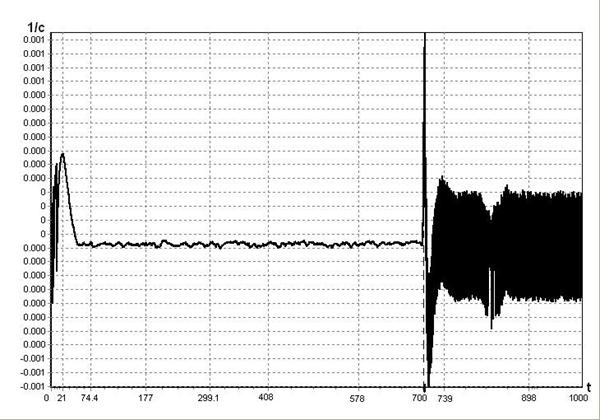
Рисунок Д.5 – Погрешность оценивания угловой скорости от времени при НУ 3-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
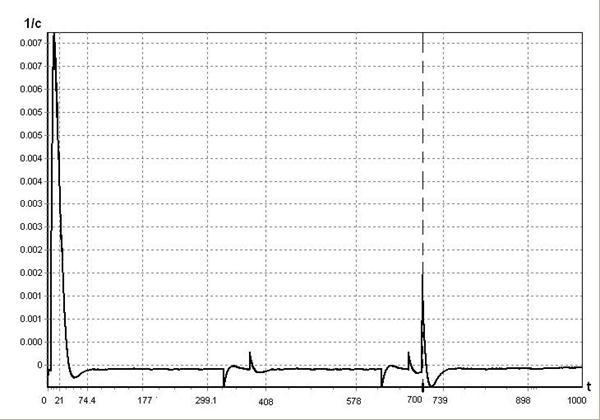
Рисунок Д.6 – Погрешность оценивания угловой скорости от времени при НУ 4-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
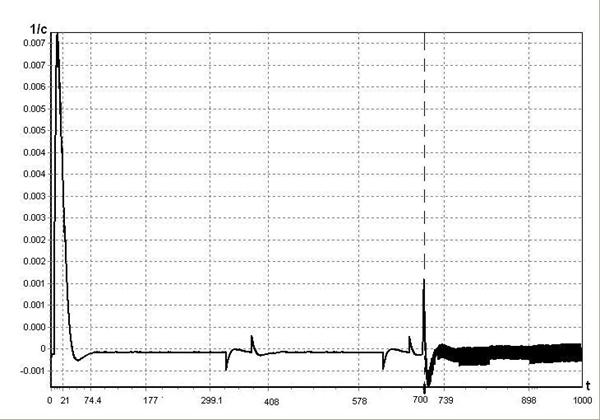
Рисунок Д.7 – Погрешность оценивания угловой скорости от времени при НУ 5-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
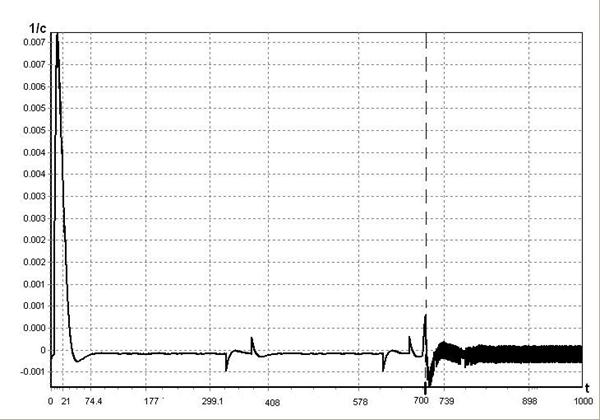
Рисунок Д.8 – Погрешность оценивания угловой скорости от времени при НУ 6-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
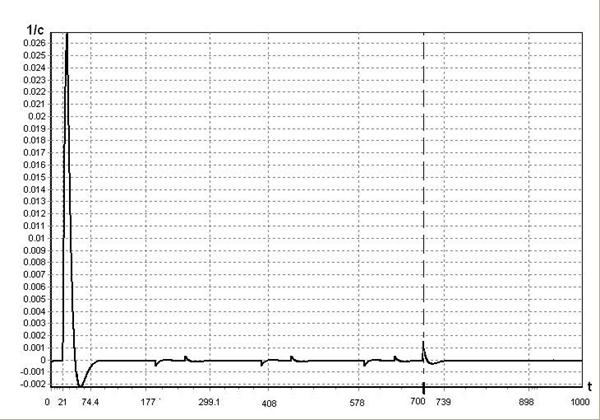
Рисунок Д.9 – Погрешность оценивания угловой скорости от времени при НУ 7-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
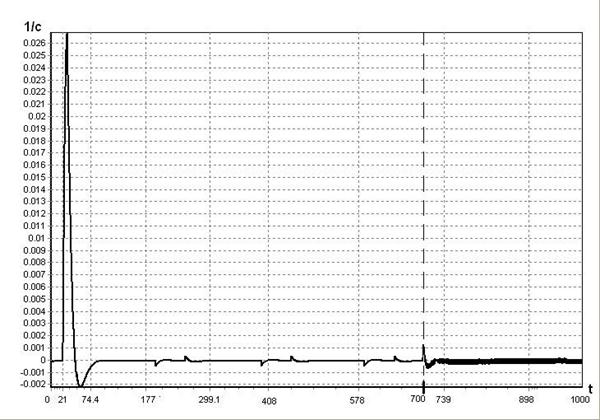
Рисунок Д.10 – Погрешность оценивания угловой скорости от времени при НУ
8-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
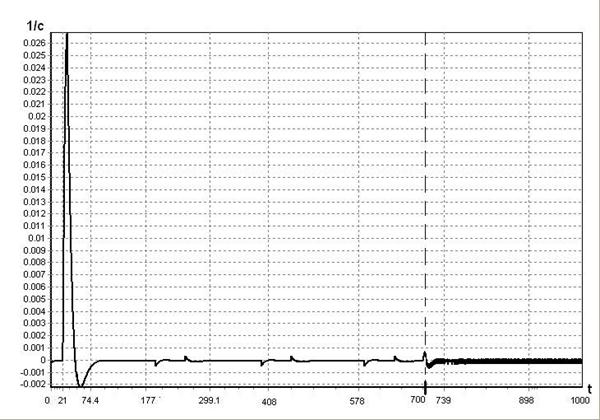
Рисунок Д.11 – Погрешность оценивания угловой скорости от времени при НУ
9-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
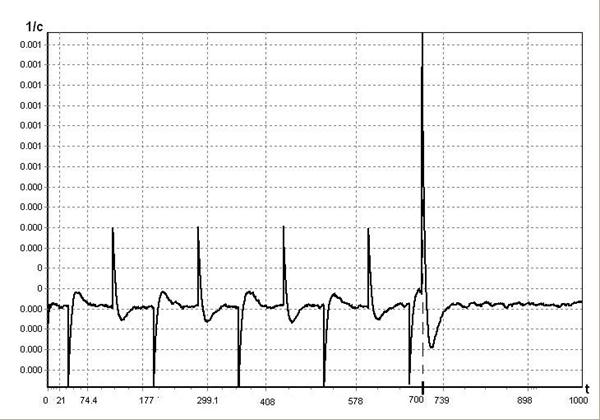
Рисунок Д.12 – Погрешность оценивания угловой скорости от времени при НУ
10-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.13 – Погрешность оценивания угловой скорости от времени при НУ
11-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.

Рисунок Д.14 – Погрешность оценивания угловой скорости от времени при НУ
12-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.15 – Погрешность оценивания угловой скорости от времени при НУ
13-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.

Рисунок Д.16 – Погрешность оценивания угловой скорости от времени при НУ
14-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
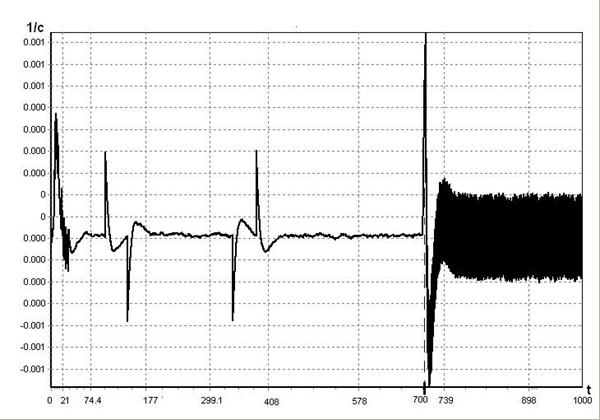
Рисунок Д.17 – Погрешность оценивания угловой скорости от времени при НУ
15-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
