

 Реферат: Синтез системы автоматического регулирования массы квадратного метра бумажного полотна
Реферат: Синтез системы автоматического регулирования массы квадратного метра бумажного полотна
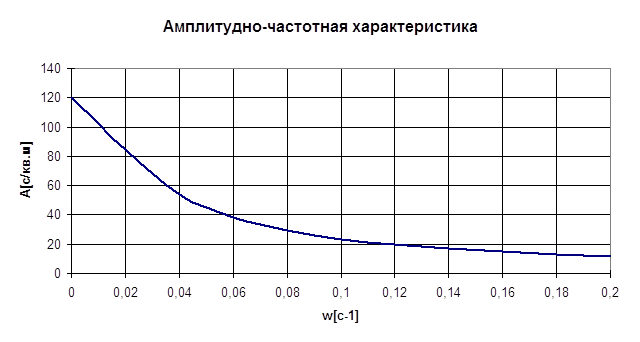
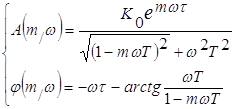
Из графика АЧХ видно: чем меньше частота входного сигнала, тем больше этот сигнал усиливается. При w = 0 коэффициент усиления равен максимальному значению 112. При больших частотах выходная величина по модулю стремится к нулю. Такие сигналы объект не пропустит.
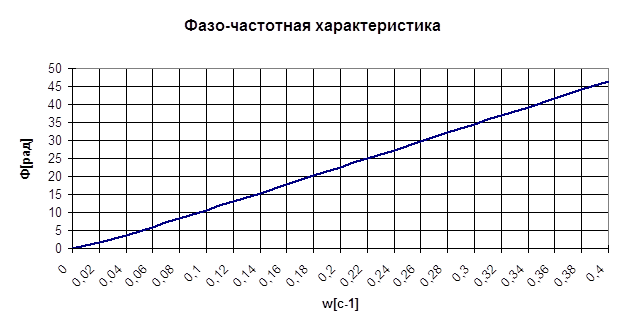
С ростом частоты увеличивается также фазовый сдвиг выходных колебаний по отношению к входным. Фазо-частотная характеристика положительна, следовательно, выходные колебания по фазе опережают входные. При w = w0 j(w) = p.
 |
|||
 |
|||
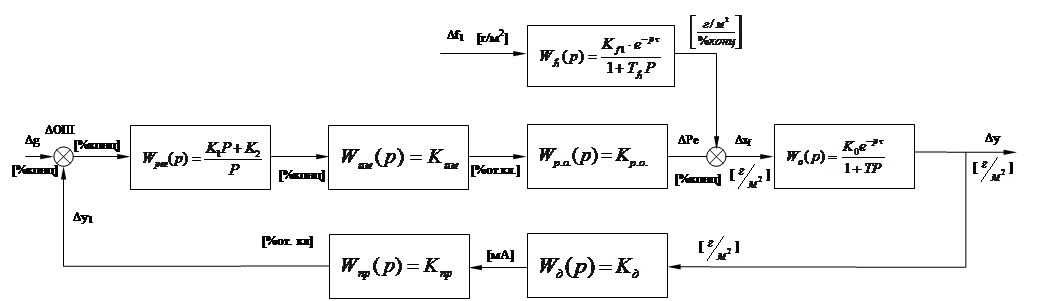
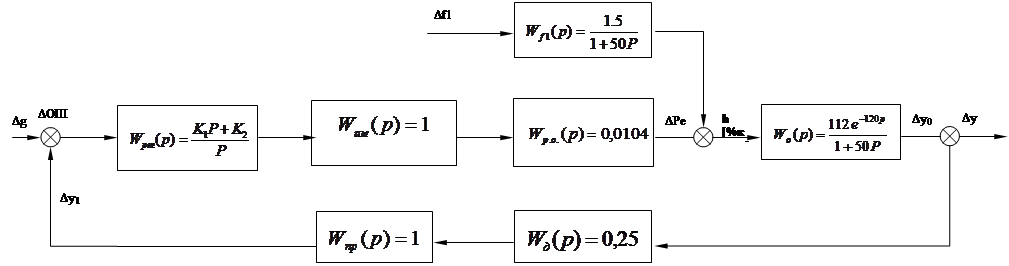
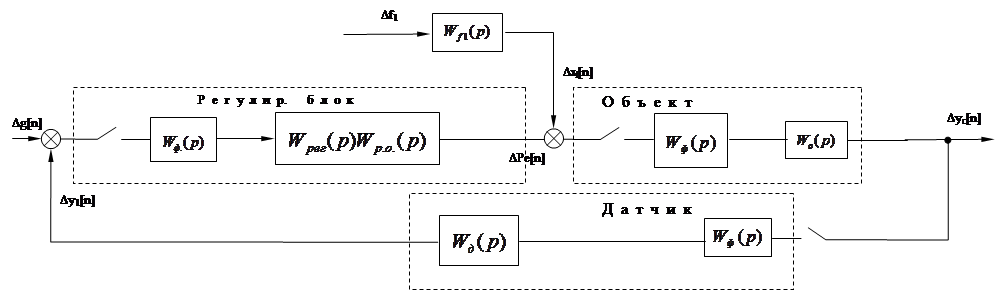
Структурная схема системы регулирования
Структурная схема системы – графическое изображение АСР в виде совокупности динамических звеньев с указанием связей между ними.
Исходными данными для построения схемы служат передаточные функции звеньев.
По составленной схеме определяем передаточные функции системы:
1. Передаточная функция разомкнутой системы:
![]()

2.Передаточная функция замкнутой системы по каналу управления:

2. Передаточная функция замкнутой системы по возмущению в виде Df1

Построение области устойчивости системы.
1. Характеристический полином замкнутой системы получим из выражения:

Отсюда:
Д(р) =![]()
![]()
2. Уравнение апериодической границы устойчивости соответствует при Р=0.
Получаем:
![]() Þ К2 = 0
Þ К2 = 0
Найдем колебательную границу устойчивости, для этого подставим:
Р=jw

Тогда:
Решив уравнение относительно К1 и К2 , найдем выражение для колебательной границы устойчивости в виде:
![]()
![]()
Рассчитываем три точки колебательной границы устойчивости при w=0; Dw; 2Dw.
|
w [c-1] |
0 | 0,005 | 0,01 |
|
К1, |
3,434 | 3,3191 | 2,8446 |
|
К2, |
0 | 0,0132 | 0,0382 |
СТУДЕНТ Ситников С.А. ГРУППА 2102
РАСЧЕТ ОБЛАСТИ УСТОЙЧИВОСТИ (ЛИНИИ РАВНОГО ЗАПАСА УСТ.) НЕПРЕР.АСР
ПАРАМЕТРЫ МОДЕЛЕЙ ИЗВЕСТНОЙ ЧАСТИ СИСТЕМЫ
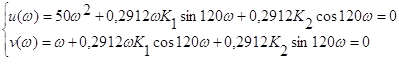
МОДЕЛЬ ОБЪЕКТА ПО КАНАЛУ УПРАВЛЕНИЯ :
коэффициент передачи объекта = 112.0000
постоянная времени объекта = 50.0000
запаздывание объекта = 120.0000
Коэф.передачи исполн.устройства = 1.0000
Коэф.передачи регулир.органа = 0.0104
Коэффициент передачи датчика = 0.2500
РАСЧЕТ ОБЛАСТИ УСТОЙЧИВОСТИ
АПЕРИОДИЧЕСКАЯ ГРАНИЦА УСТОЙЧИВОСТИ K2 = 0
ТАБЛИЦА КОЛЕБАТЕЛЬНОЙ ГРАНИЦЫ УСТОЙЧИВОСТИ
W K1 K2
0.000000 -3.434066 0.000000
0.001538 -3.327219 0.001369
0.003077 -3.011959 0.005329
0.004615 -2.503887 0.011447
0.006154 -1.828233 0.019034
0.007692 -1.018726 0.027196
0.009231 -0.116080 0.034896
0.010769 0.833836 0.041032
0.012308 1.782074 0.044517
0.013846 2.678837 0.044370
0.015385 3.475768 0.039792
0.016923 4.128202 0.030245
0.018462 4.597282 0.015513
0.020000 4.851844 -0.004253
РАСЧЕТ ЛИНИИ РАВНОГО ЗАПАСА УСТОЙЧИВОСТИ
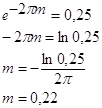
СТЕПЕНЬ КОЛЕБАТЕЛЬНОСТИ = 0.22
W K1 K2
0.000000 -3.434066 0.000000
0.001538 -2.954172 0.001362
0.003077 -2.334213 0.005027
0.004615 -1.620191 0.010232
0.006154 -0.858793 0.016105
0.007692 -0.095154 0.021747
0.009231 0.629134 0.026307
0.010769 1.277682 0.029049
0.012308 1.820598 0.029409
0.013846 2.235384 0.027029
0.015385 2.507436 0.021783
0.016923 2.630145 0.013783
0.018462 2.604631 0.003363
0.020000 2.439161 -0.008941
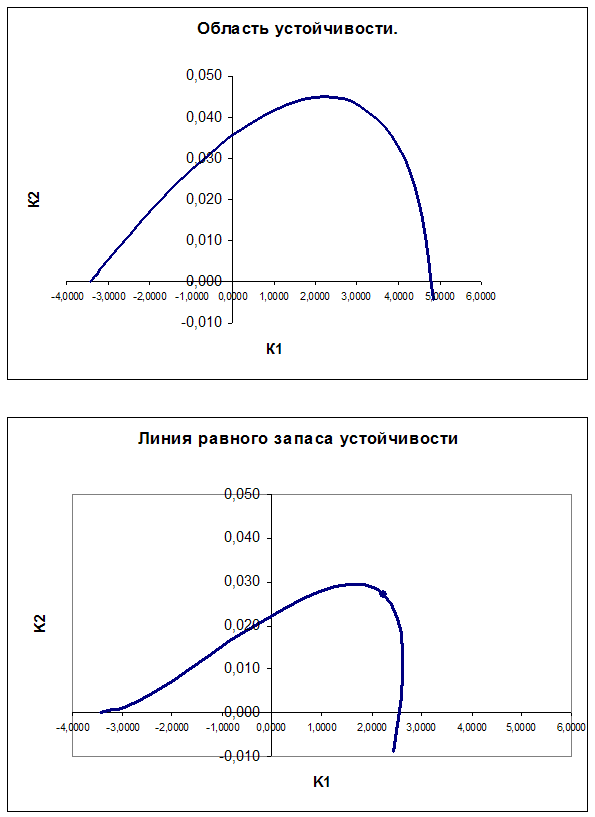
Область устойчивости системы в плоскости варьируемых параметров.
Определение направления штриховки колебательной границы устойчивости производится в соответствии со знаком определителя вида.
D(w)=![]()

 =
= 
 =
=



![]()
При перемещении вдоль колебательной границы в направлении возрастании частоты от 0 до ¥ кривая штрихуется слева, т. к. Dw > 0. Если частоту менять в пределах от - ¥ до 0 (w < 0), то определитель меняет знак и, двигаясь вдоль увеличения частоты, нужно штриховать правую часть кривой. Таким образом, кривая колебательной границы проходится дважды, при этом штрихуется одна и та же часть кривой двойной штриховкой. Апериодическая граница устойчивости штрихуется в сторону колебательной границы устойчивости.
Параметры регулятора K1 ; K2, выбранные из области устойчивости системы, обеспечат затухание переходной составляющей её движения при любых начальных отклонениях и внешних воздействиях.
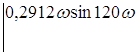
Расчет линии равного запаса устойчивости.
1.Выведем выражение расширенной АФЧХ регулирующего блока Wр.б.(m1jw)
Передаточная функция:
 ,
,
Заменим р на (j - m)w:
Запишем ![]() в виде
в виде
![]() =
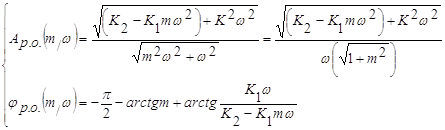
=![]() , где
, где
![]() - расширенная АЧХ звена
- расширенная АЧХ звена
![]() -расширенная ФЧХ звена
-расширенная ФЧХ звена
Тогда:
2.Выведем выражение расширенной АФЧХ части системы, содержащей остальные элементы в контуре управления.
![]()
![]() ,
,
![]() где
где ![]()
Заменим р на ![]()
![]()

![]() , отсюда
, отсюда
Запишем ![]() в виде
в виде
![]()
Тогда:
Между заданной степенью колебательности m системы и характером расширенных и частотных характеристик с тем же m существует определенная связь. Для нахождения системы на границе заданной степени колебательности m, определяющей заданный запас устойчивости, необходимо выполнение следующего соотношения:
![]()
или в показательной форме
![]()
или
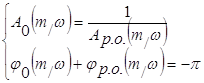
Получили два условия.
Первое условие приводит к уравнению:

Второе условие к уравнению вида:

Решив уравнение относительно К1 и К2 получим:


|
|
0 | 0,005 | 0,01 |
|
|
0 | 0,6 | 1,2 |
|
|
0 | 0,5646 | 0,932 |
|
|
1 | 0,8253 | 0,3642 |
|
|
1 | 1,1411 | 1,3021 |
|
|
-0,0089 | -0,0059 | -0,0032 |
|
|
0 | 0 | 0,0001 |
Все значения К1 и К2, лежащие на кривой обеспечат заданные запас устойчивости. Значения К1 и К2, лежащие внутри области, ограниченной данной кривой и осями координат, обеспечат запас больше заданного или степень затухания больше заданной, а лежащие вне этой области – степень затухания меньше заданной. Специальными исследованиями было установлено, что настройки, расположенные чуть правее экстремума линии равного запаса устойчивости, обеспечивают минимум квадратичного интегрального критерия качества, поэтому эти настройки можно назвать оптимальными.
Получение переходного процесса системы на заданный вид воздействия.
Рассмотрим операторный метод расчета непрерывных систем. Суть метода заключается в том, что каждый элемент непрерывной системы заменяется его дискретным аналогом, для этого вводим в модель непрерывного элемента импульсный элемент.
Дискретная модель системы.
Импульсную модель элемента можно описать разностным уравнением, вид которого определяется формирующим элементом. Самым простым формирующим элементом является экстраполятор нулевого порядка с передаточной функцией вида:
![]() , где Т0 – период дискретности. Тогда
дискретная передаточная функция непрерывного элемента найдётся как:
, где Т0 – период дискретности. Тогда
дискретная передаточная функция непрерывного элемента найдётся как: ![]()
Выбор периода дискретности Т0.
Допустимая погрешность моделирования определяется из условия выбора периода дискретности Т0 = Т/(10 ¸15), где Т – постоянная времени системы, при этом должно выполнятся условие: t / Т0 > 5 ¸ 10, где t - запаздывание системы.
![]()
Дискретная модель объекта регулирования:
 , где
, где ![]() ; m = t/T0 (число тактов запаздывания – целое число).
; m = t/T0 (число тактов запаздывания – целое число).
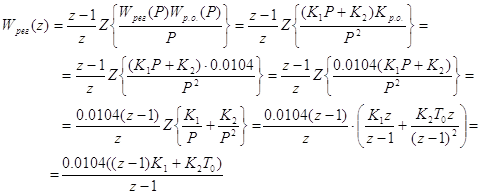
Дискретная модель регулятора совместно с регулирующим блоком.
Дискретная модель датчика: Wдат (Z) = Kд = 0.25
Система разностных уравнений, описывающих работу данной АСР, при переходном процессе.
|
1. Уравнение регулируемого параметра:
![]()
![]()
yc[n] = 0.8yc[n - 1] + 22.4x[n - 13]
2. Уравнение датчика:
y1[n] = Кд×yc[n] = 0.25yc[n]
3. Уравнение элемента сравнения:
ОШ[n] = Dg ×Кд – y1[n] = 0.375 - y1[n]
4. Уравнение регулирующего воздействия:
X[n] = X[n - 1] + Kр.о. ×K1× ОШ[n] + Kр.о. × (K2 T0 - K1 )× ОШ[n - 1]
X[n] = X[n - 1] + 0.0232 × ОШ[n] - 2.2316 × ОШ[n - 1]
Выбираем параметры настройки ПИ регулятора:
K1 = 2.234451
K2 = 0.027039
