

 Реферат: Синтез системы автоматического регулирования массы квадратного метра бумажного полотна
Реферат: Синтез системы автоматического регулирования массы квадратного метра бумажного полотна
Реферат: Синтез системы автоматического регулирования массы квадратного метра бумажного полотна
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ РАСТИТЕЛЬНЫХ ПОЛИМЕРОВ
Кафедра АХТП
КУРСОВАЯ РАБОТА
по
ТЕОРИИ УПРАВЛЕНИЯ
«СИНТЕЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МАССЫ КВАДРАТНОГО МЕТРА БУМАЖНОГО ПОЛОТНА
ПО ЗАДАННЫМ КРИТЕРИЯМ КАЧЕСТВА»
Выполнил: студент V курса .
Ситников С. А. .
шифр 965-450 .
Проверил: преподаватель .
Селянинова Л. Н. .
С.-ПЕТЕРБУРГ
2000г.
|
№ |
Наименование элементов схемы АСР, их математическая модель, параметры модели. Рассматриваемые воздействия. Требования к проектируемой системе регулирования. |
Обозначения переменных. |
Размерность переменных |
Значение |
| 1 | 2 | 3 | 4 | 5 |
| 1. |
Объект регулирования. Канал: “изменение расхода массы - изменение массы 1 м2 полотна”. Математическая модель объекта: Wоб(р) = К0 Параметры модели: - постоянная времени объекта - коэффициент передачи объекта - запаздывание по рассматриваемому каналу передачи информации |
Т К0 t
|
с с |
50 112 120 |
| 2. |
Измерительное устройство, датчик электронный с преобразователем. Математическая модель датчика: Параметр модели: коэффициент передачи |
Кд
|
ma |
0,25 |
| 3. |
Регулирующий блок /совокупность электронного регулятора и электродвигателя/ приближенно реализует ПИ-закон регулирования. Математическая модель регулирующего блока:
К1 - пропорциональная составляющая закона регулирования К2 - интегральная составляющая закона регулирования
|
К1 К2 |
||
| 4. |
Регулирующий орган: клапан Модель клапана:
Параметры модели: коэффициент передачи |
Кро |
|
0,0104 |
| 5. |
Требования к качеству работы проектируемой системы: 1. Точность регулирования массы 1 м2 полотна 2. Минимальное значение степени затухания |
e ' |
г/м2 |
0,4 0,75 |
| 6. |
Типовые входные воздействия: 1. Изменение задающего воздействия: 2. Изменение концентрированной массы:
|
С1 С2 |
г/м2 % конц. |
1,5 -3 |
| 7. |
Канал передачи возмущения: “Изменение
концентрации массы” – “изменение массы 1 м2 полотна”
|
Кf1Тf1 |
с |
1,1 60 |
 :
: Задача
Цель создания автоматической системы – достичь того, чтобы значение массы 1 кв. м. бумажного полотна было равно заданному. При этом требуется, чтобы точность регулирования, т.е. возможное отклонение, находилось в определенных пределах. Поэтому, для синтеза системы выбран принцип управления по отклонению регулируемой величины от задания.
Принцип работы
Объект регулирования – напорный ящик БДМ.
Регулируемая величина – масса 1 кв.м. полотна.
Регулирующая величина – расход массы.
Возмущающее воздействие – изменение концентрации массы.
Автоматический регулятор – средство решения задачи регулирования.
Автоматический регулятор состоит из электронного датчика измеряющего массу 1 кв.м. полотна, регулирующего блока (электрорегулятор и электродвигатель), приблизительно соответствующего ПИ-закону регулирования, клапана, изменяющего расход бумажной массы.
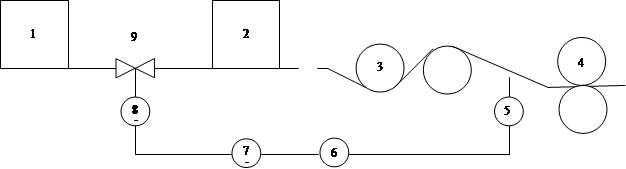
1. - бак массы
2. – напорный ящик
3. – сушильные группы
4. – каландр
5. – датчик массы 1кв.м. полотна
6. – преобразователь
7. – регулятор
8. – эл. двигатель - исполнительный механизм
9. – регулирующий орган - клапан
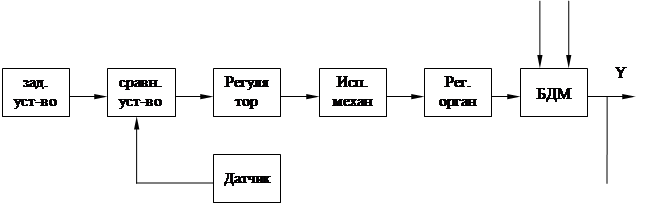 Функциональная схема системы.
Функциональная схема системы.
![]()
Текущее значение массы 1 кв.м. полотна фиксируется датчиком. Через преобразователь на регулирующий блок подается электрический сигнал. В регулирующем блоке происходит сравнение поступившего сигнала с заданным значением. В результате сравнения полученное отклонение определяет величину управляющего воздействия, которое должно нейтрализовать отклонение. В зависимости от величины и знака управляющего воздействия, управляющий блок формирует воздействие на исполнительный механизм (эл. двигатель).
Модель системы управления в виде «черного ящика»

Δg(t) [кг/м3] – изменение расхода бумажной массы (задающее воздействие)
Δf(t) [%] - изменение концентрации массы (возмущающее воздействие)
Δy(t) [г/м2] – изменение массы 1кв.м. полотна (выходная переменная)
Временные характеристики по каналу управления.
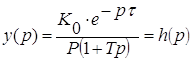
Передаточная функция объекта регулирования.
Wоб(р) = К0 ![]()
![]()
-
коэффициент
передачи ![]()
- постоянная времени Т =50 с
- запаздывание информации t =120 с
Это апериодическое звено 1-го порядка с запаздыванием.
Переходная функция h(t) определяется как переходной процесс на выходе звена при подаче на его вход единичного ступенчатого воздействия 1[t] при нулевых начальных условиях. Чтобы получить переходную функцию звена, нужно изменить его входной сигнал на одну единицу. (расход массы на 1кг/с).
|
х(t)=1[t]
Зная,
x
(p)= x L [1(t)]=![]()
Получаем изображение переходной функции:
Обратное преобразование дает переходную функцию звена первого порядка с запаздыванием:
 ; % влажности
; % влажности
 ;
;
![]()
Для расчета переходной функции необходимо приблизительно оценить время окончания переходного процесса. Его можно вычислить по выражению:
tпер.пр. » 3 - 4T+t » 320 c
Выбираем шаг расчета:
Dt = ![]() , N – желаемое количество точек графика;
, N – желаемое количество точек графика;
N=10,
Dt = 32 c
Результаты расчета сведены в Таблицу 1.
Весовая функция W(t) представляет собой переходной процесс на выходе звена на единичную импульсную функцию d [t] при нулевых начальных условиях. Единичная импульсная функция является производной от единичной ступенчатой функции d [t] =1¢ [t]. Переходная весовая функции связаны соотношением:
![]()
Отсюда:
 ,
, ![]() , т.е.
, т.е.
 ;
; ![]()
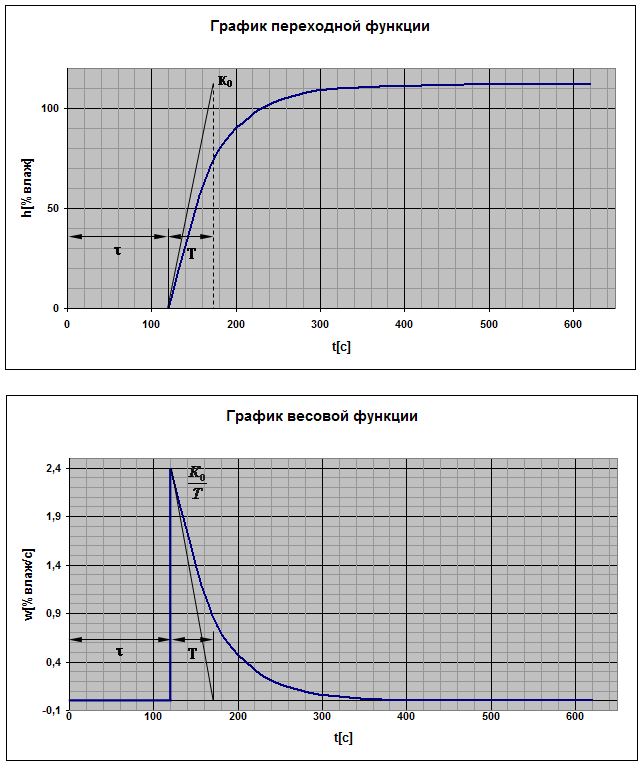
Таблица 1.
Расчет переходной и весовой функции объекта по каналу управления.
| T, c | 0 | 120 | 152 | 184 | 216 | 248 | 280 | 312 | 344 | 376 | 408 | 440 |
| H(t),г/м | 0,0 | 0,0 | 52,943 | 80,860 | 95,580 | 103,34 | 107,43 | 109,593 | 110,731 | 111,331 | 111,647 | 111,81 |
| W(t),г/м | 0,0 | 2,4 | 1,266 | 0,667 | 0,352 | 0,186 | 0,098 | 0,052 | 0,027 | 0,014 | 0,008 | 0,004 |
По данным Таблицы 1 построены графики переходной и весовой функции.
Основные параметры объекта по каналу управления могут быть определены из этих графиков.
Основные параметры объекта по каналу управления могут быть
Частотные характеристики объекта по каналу управления.
Частотные характеристики описывают установившиеся вынужденные колебания на выходе звена, вызванные гармоническим воздействием на входе.
Выражения частотных характеристик по каналу управления могут быть получены из выражения частотной передаточной функции:
![]()
 ,
,
где А(w) - АЧХ объекта
j(w) - ФЧХ объекта
Зависимость отношения амплитуд выходных и входных колебаний от их частоты называется амплитудно-частотной характеристикой (АЧХ). Зависимость разности фазы выходных и входных колебаний от частоты называется фазо-частотной характеристикой (ФЧХ) системы.
Найдем модуль частотной передаточной функции (АЧХ):
![]()
 (1*)
(1*)
Частота Wпр., определяющая полосу частот пропускания объекта, найдется из условия:
![]()
![]() ,
подставляем в (1*)
,
подставляем в (1*)
 ,
отсюда
,
отсюда ![]()
|
Угол фазового сдвига находится как арктангенс отношения мнимой части комплексного числа к вещественной:
![]()
С учетом того, что К0=112>0 выражение ФЧХ запишется в виде:
|
Частотные характеристики будем строить на диапазоне от 0 до 10 wпр.
Таблица 2
|
w, с-1 |
0 |
0,02 |
0,04 |
0,06 |
0,08 |
0,1 |
0,12 |
0,14 |
0,16 |
0,18 |
0,2 |
|
АЧХ,
|
120,00 | 84,8528 | 53,6656 | 37,9473 | 29,1043 | 23,5339 | 19,7279 | 16,9706 | 14,8842 | 13,2518 | 11,9404 |
|
рад. |
0,0000 | 1,6146 | 3,6929 | 5,9510 | 8,2742 | 10,6266 | 12,9944 | 15,3711 | 17,7536 | 20,1399 | 22,5289 |
