

 Курсовая работа: Разработка математической модели теплообменника смешения
Курсовая работа: Разработка математической модели теплообменника смешения
Выделим случай, когда входной сигнал x(t) является элементарной функцией 1(t). Реакцию системы на воздействие 1(t) можно компактно:
 ,
(5.1)
,
(5.1)
где W(D) называется операторной передаточной функцией или оператором. Формально W(D) можно рассматривать как дробно-рациональную функцию от оператора:
 .
(5.2)
.
(5.2)
Воспользуемся преобразованием Лапласа, основываясь на утверждении
![]() ,
(5.3)
,
(5.3)
если f(0) = 0. Аналогично можно записать:
![]()
![]() (5.4)
(5.4)
![]() (5.5)
(5.5)
для любого операторного многочлена степени k, если f(t) и ее производные при t < 0, равны нулю.
Применяя правило (5.5), получим
![]() ,
(5.6)
,
(5.6)
где ![]()
При этом предполагается, что равны нулю y(0), x(0) и начальные значения производных y(t), x(t) вплоть до (n – 1)-й и (m – 1)-й соответственно. Теперь a(p), b(p) - обычные функции комплексной переменной p. Поэтому операция деления на a(p) имеет обычный смысл
 .
(5.7)
.
(5.7)
Учитывая определения (5.7), приходим к основной формуле
![]() .
(5.8)
.
(5.8)
Для осуществления z-преобразования и выбора периода квантования воспользуемся пакетом Matlab:
clc, clear
%Передаточная функция по 1-ому динамическому каналу
W1=tf([1.25],[5 1]);
%Передаточная функция по 2-ому динамическому каналу
W2=tf([0.924],[5 1])
%Формирование передаточной объекта
Wo=series(W1,W2)
T=0.5;
WWo=c2d(Wo,T,'zoh')
figure(1);
step(Wo,WWo)
grid on
Определяем погрешность квантования:
![]()
Погрешность квантования не превышает заданную (7%), значит выполняем переход от непрерывной модели к дискретной с периодом квантования 0.5.
Передаточная функция в z-области:
![]()
Программа перехода от непрерывной модели(модели в пространстве состояния ) к дискретной в пакете MATLAB
clc, clear
% задаем матрицы параметров
A=[-0.2 0;0 -0.2]
B=[0;0.1848]
F=[0.25;0]
C=[1 1]
D=[0]
BB=[B F]
% переход в область переменных состояний
sistema1=ss(A,BB,C,D)
% переход в дискретную область
sistema2=c2d(sistema1,0.5)
Wz=tf(sistema2)
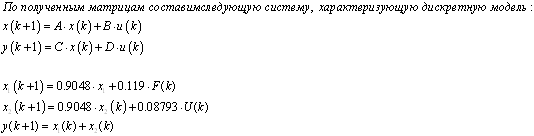
Модель в пространстве состояний.
a = x1 x2 x1 0.9048 0 x2 0 0.9048 b = u1 u2 x1 0 0.119 x2 0.08793 0
c = x1 x2 y1 1 1 d = u1 u2 y1 0
Передаточная функция в z-области по каналам.
1.По первому динамическому каналу.
![]()
5. Получение переходных функций объекта по передаточным функциям каналов
Переходной характеристикой(переходной функцией) h(t) называется реакция системы на единичное ступенчатое входное воздействие u(t-τ)=1(t-τ) при нулевых начальных условиях. Единичная ступенчатая функция – это функция, которая обладает свойством
![]()
На рисунке 5.1 приведен пример переходной характеристики системы.
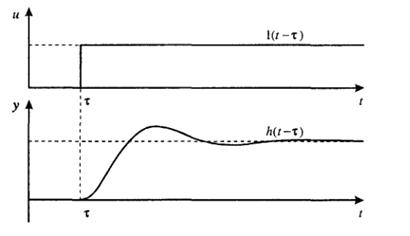
Рисунок 5.1-Пример переходной характеристики системы (τ – момент возникновения входного воздействия)
Для аналитического определения переходной функции следует решить дифференциальное уравнение при нулевых начальных условиях и единичном входном воздействии. При исследовании реального объекта переходную характеристику можно получить экспериментальным путем, подавая на его вход ступенчатое воздействие и фиксируя реакцию на выходе. Если входное воздействие представляет собой неединичную ступенчатую функцию u(t)=k1(t), то выходная величина будет равна y(t)=kh(t), т.е. представляет собой переходную характеристику с коэффициентом пропорциональности k[2].
Для построения переходной характеристики воспользуемся пакетом
Matlab:
clear,clc
W1=tf([1.25],[0.05 1]);
step(W)
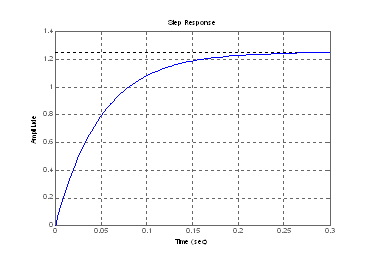
Рисунок 5.1- Переходная характеристика объекта по первому динамическому каналу
6. Расчет коэффициентов передаточной функции по экспериментальной переходной функции методом площадей
Сравнение результатов расчета с истинной (аналитической) передаточной функцией объекта.
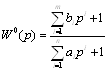
В основе метода площадей лежит предположение, что объект может быть описан линейным дифференциальным уравнением с постоянными коэффициентами, а его нормированная (приведенная к единице) переходная характеристика может быть аппроксимирована передаточной функцией вида:
 (6.1)
(6.1)
Порядок числителя в выражении (6.1) всегда меньше или равен порядку знаменателя. Для нахождения явного вида выражения (6.1) для конкретного технологического объекта необходимо определить значения коэффициентов ai и bi, а также значения степеней полиномов n и m.
На первом этапе осуществляют нормирование переходной характеристики и входного воздействия:
![]() ;
;
![]() (6.2)
(6.2)
Искомые коэффициенты W0(p) определяются из системы уравнений:
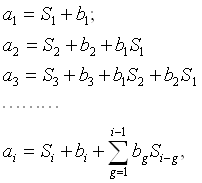 (6.3)
(6.3)
где i=m+n и для всех i>n ai=0, а для всех i>m bi=0.
Входящие в эту систему уравнений коэффициенты S1, S2,
…, Si связаны с кривой разгона интегральными соотношениями и вычисляются в
соответствии с (4), где обозначено  - относительное
время.Для расчета S1, S2 … Si используют численные методы (метод прямоугольников,
метод трапеций и др.):[2]
- относительное
время.Для расчета S1, S2 … Si используют численные методы (метод прямоугольников,
метод трапеций и др.):[2]
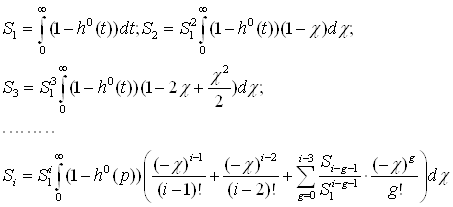 (6.4)
(6.4)
Переход от нормированной передаточной функции к обычной осуществляется путем ее умножения на коэффициент передачи
![]() :
: ![]() (6.5)
(6.5)
Программа расчет коэффициентов передаточной функции по экспериментальной переходной функции методом площадей в Matlab 6.5
clc,clear
T=0:1:30;
W=tf([1.25],[5 1])
y=step(W, T);
[T' y];
plot(T,y,'k');
grid
Таблица экспериментальных данных 6.1
| t | y |
| 0 | 0 |
| 1 | 0.22659 |
| 2 | 0.4121 |
| 3 | 0.56399 |
| 4 | 0.68834 |
| 5 | 0.79015 |
| 6 | 0.87351 |
| 7 | 0.94175 |
| 8 | 0.99763 |
| 9 | 1.0434 |
| 10 | 1.0808 |
| 11 | 1.1115 |
| 12 | 1.1366 |
| 13 | 1.1572 |
| 14 | 1.174 |
| 15 | 1.1878 |
| 16 | 1.199 |
| 17 | 1.2083 |
| 18 | 1.2158 |
| 19 | 1.222 |
| 20 | 1.2271 |
| 21 | 1.2313 |
| 22 | 1.2347 |
| 23 | 1.2374 |
| 24 | 1.2397 |
| 25 | 1.2416 |
| 26 | 1.2431 |
| 27 | 1.2444 |
| 28 | 1.2454 |
| 29 | 1.2462 |
| 30 | 1.2469 |
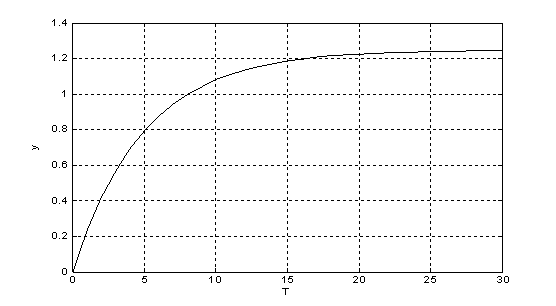
Рис.6-1. График переходной экспериментальной характеристики.
clear, clc
dt=1
h=[0 0.22659 0.4121 0.56399 0.68834 0.79015 0.87351 0.94175 0.99763 1.0434 1.0808 1.1115 1.1366 1.1572 1.174 1.1878 1.199 1.2083 1.2158 1.222 1.2271 1.2313 1.2347 1.2374 1.2397 1.2416 1.2431 1.2444 1.2454 1.2462 1.2469]
h1=h/1.25
n=length(h)
i=1:n
t=(i-1)*dt
s1=dt*(sum(1-h1)-0.5*(1-h1(1)))
y=step(1.25,[s1 1], t);
plot(t,h,'ko',t,y);
grid
[yexp t]=step(1.25,[s1 1],t)
[s1]
s1 = 5.0054
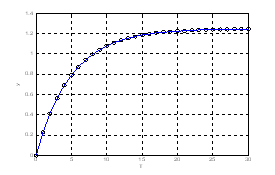
Рис. 6-2. Совмещённый график расчётной и экспериментальной переходной характеристики.
В результате выполнения программы были получены следующие результаты:
Как видно из рисунка 6.2, экспериментальная и рассчитанная переходные характеристики практически не отличаются. Заключение
В данной курсовой работе была получена математическая модель теплообменника в виде дифференциальных уравнений. Также была получена передаточная функция объекта по заданному каналу (регулирование температуры подаваемой жидкости) и ее переходная характеристика.
Для идеального случая (возмущения
отсутствуют) и при наличии возмущений по двум другим каналам была получена
модель в переменных состояния. А также по заданному каналу дискретная модель.
По экспериментальной передаточной функции с помощью метода площадей
была получена расчетная передаточная функция. Сравнение показало, что
экспериментальная и расчетная передаточные характеристики практически не
отличаются.
Список использованной литературы
1 Полоцкий Л. М., Лапшенков Г.И. «Автоматизация химических производств». Теория, расчет и проектирование систем автоматизации - М:Химия, 1982. – 296 с.
2 Кузьмицкий, И.Ф., Кулаков Г.Т. Теория автоматического управления : учеб. пособие для студентов специальности «Автоматизация технологических процессов и производств». – Минск: БГТУ, 2006. – 486
3 Казаков А.В ,Кулаков М.В, Мелюшев Ю.К.Основы автоматики и автоматизации химических производств.Москва 1970.-374
