

 Курсовая работа: Разработка математической модели теплообменника смешения
Курсовая работа: Разработка математической модели теплообменника смешения
Недостатки аналитического метода — его сложность и трудоемкость, из-за чего в широкой практике автоматизации он применяется сравнительно редко. Однако в последнее время интерес к этому методу увеличился в связи со все более широким распространением вычислительных машин, использование которых позволяет резко повысить производительность труда при выполнении расчетов.
2. Экспериментально-аналитический, когда статическая и динамическая характеристики объекта регулирования определяются путем механической обработки результатов экспериментов, поставленных на исследуемом объекте по определенной методике.
Этот метод менее трудоемок, не требует детального изучения физико-химических закономерностей, определяющих работу объекта, не может быть осуществлен персоналом относительно невысокой квалификации. Полученные при этом результаты достаточно точны для большинства практических случаев, поэтому экспериментально-аналитический метод широко используется на практике. Его недостаток заключается в том, что математическая модель, полученная экспериментально, справедлива только для обследованного объекта и не может быть использована при изучении других объектов, даже близких к нему по технологии и аппаратурному оформлению[3].
1.2 Аналитическое определение характеристик объектов регулирования
При использовании аналитического метода определения характеристик объектов регулирования за основу берут уравнения материального и энергетического баланса объекта. Если необходимо определить статическую характеристику, то уравнение баланса составляют для статического (установившегося) режима работы объекта. Типичным примером является вывод уравнения статической характеристики напорного бака (пункт 1) на основе уравнения его материального баланса.
При определении аналитическим методом динамической характеристики объекта регулирования также составляют уравнения баланса, но для динамического (неустановившегося) режима работы объекта. Эти уравнения выражают связь скорости изменения регулируемого параметра с величиной материального или энергетического разбаланса, когорый является причиной возникновения динамического режима работы объекта.
Пример 1
Определить характеристики теплообменника смешения (рис.
1.4) как объекта регулирования температуры. Теплообменник
является смесителем непрерывного действия, в который поступают два потока
одинаковой по физическим свойствам жидкости (т. е. с одинаковой теплоемкостью ![]() и плотностью
и плотностью
![]() ).
).
Первый поток
имеет постоянный расход. ![]() и переменную
температуру
и переменную
температуру ![]() . Второй
поток жидкости имеет постоянную температуру
. Второй
поток жидкости имеет постоянную температуру ![]() , а расход его
, а расход его ![]() поддерживается на таком уровне, чтобы температура
поддерживается на таком уровне, чтобы температура ![]() жидкости, выходящей из
смесителя, была равна постоянной заданной величине
жидкости, выходящей из
смесителя, была равна постоянной заданной величине ![]() . Следовательно, для данного объекта возмущающим
воздействием служит изменение температуры
. Следовательно, для данного объекта возмущающим
воздействием служит изменение температуры ![]() первого потока, регулирующим
воздействием является изменение расхода
первого потока, регулирующим
воздействием является изменение расхода ![]() второго потока , а
регулируемым параметром-отклонение температуры
второго потока , а
регулируемым параметром-отклонение температуры ![]() выходящего
потока от заданного значения.
выходящего
потока от заданного значения.
Чтобы упростить вывод уравнения статической и динамической характеристики, примем следующие допущения:cмеситель снабжен теплоизоляцией, так чтобы тепловыми потерями в окружающую среду можно было пренебречь; температура жидкости во всем объеме смесителя одинакова( смеситель идеального перемешивания) и равна температуре выходящего потока; расход
![]() (1.9)
(1.9)
Для определения статической характеристикисоставим уравнение теплового баланса смесителя в установившемся режиме
Таблица1.1
|
|
|
|
|
|
|
|
|
|
| 0.25 | 0.33 | 50 | 35 | 40 | 3.2 | 800 | 0.25 | 0.64 |
![]() (1.10)
(1.10)
Откуда с учетом условия (1.9) получим линеаризованное уравнение статической характеристики в виде.
 (1.11)
(1.11)
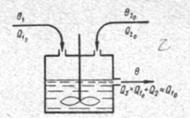
Рис 1.4.Теплоабменник смешения как объект регулирования температуры.
При нарушении
равновесия между притоком и стоком тепла в смеситель за малый промежуток
времени ![]() поступает
некоторое дополнительное количество тепла
поступает
некоторое дополнительное количество тепла ![]() . В результате
изменяется температура жидкости в смесителе и температура выходящего потока на
величину
. В результате
изменяется температура жидкости в смесителе и температура выходящего потока на
величину ![]() . Величина теплового разбаланса
определяется зависимостью
. Величина теплового разбаланса
определяется зависимостью
![]()
Где ![]() — дополнительное количество тепла,
внесенное в смеситель первым потоком при изменении его температуры на
— дополнительное количество тепла,
внесенное в смеситель первым потоком при изменении его температуры на ![]() ;
;
![]() —
дополнительное количество тепла, внесенное в смеситель вторым потоком при
изменении его расхода на
—
дополнительное количество тепла, внесенное в смеситель вторым потоком при
изменении его расхода на ![]() ;
;
![]() —
дополнительное количество тепла, вынесенное
—
дополнительное количество тепла, вынесенное
из смесителя
выходящим потоком при изменении температуры жидкости в смесителе на величину ![]() .
.
Учитывая
условие (1.9), выражение для ![]() можно
упростить:
можно
упростить:
![]() (1.12)
(1.12)
Изменение
температуры жидкости в смесителе, вызванное разбалансом ![]() , равно
, равно
![]() (1.13)
(1.13)
где V0 — рабочий объем смесителя (V0 = const).
Подставим
значение ![]() из (1.11) в
(1.12) и после очевидных преобразований, переходя к пределу при
из (1.11) в
(1.12) и после очевидных преобразований, переходя к пределу при ![]() , получим
уравнение, описывающее динамическую характеристику данного объекта:
, получим
уравнение, описывающее динамическую характеристику данного объекта:
![]() (1.14)
(1.14)
Выведенное
ранее уравнение статической характеристики (1.13) может быть получено из (1.13)
при выполнения условия равновесия, т.е когда ![]() Для
приведения уравнения (1.14) к безразмерной форме введем следующее обозначение:
Для
приведения уравнения (1.14) к безразмерной форме введем следующее обозначение:
![]()
![]()
![]()
Подставляя данные из таблицы 1.1 получим следующее:
 (1.15)
(1.15)
![]() (1.16)
(1.16)
 (1.17)
(1.17)
![]()
![]()
![]()
После подстановки их в уравнение (1.14) и проведения необходимых преобразований получим в оканчательном виде.
![]() (1.18)
(1.18)
![]() (1.19)
(1.19)
![]() (1.20)
(1.20)
Преобразуем в область Лапласа

2. Получение передаточных функций по заданным
динамическим каналам объекта
Передаточные функции характеризуют изменение сигнала при прохождении через систему.
Отношение Лапласовых изображений выходной и входной величин системы при нулевых начальных условиях называется передаточной функцией системы W(p)
 (2.1)
(2.1)
где xвх(p) и xвых(p) – изображение по Лапласу входной и выходной величин системы.
По передаточной функции системы W(p) и изображению ее входной величины можно найти изображение выходной величины
![]() (2.2)
(2.2)
При наличии одной входной и одной выходной величины система или звено имеют только один канал прохождения сигнала, а следовательно, и одну передаточную функцию. Если же система или звено имеют несколько каналов прохождения сигнала, что возможно при нескольких выходных и входных величинах, то прохождение сигнала в каждом канале характеризуется своей передаточной функцией[2].
Передаточные функции теплообменника могут быть найдены по его уравнению динамики, а также по структурной схеме (рис.2.1), составленной по равенствам (1.19).
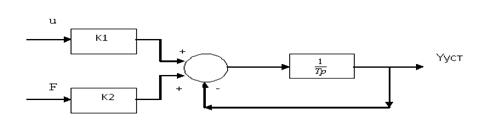
Рисунок 2.1-Структурная схема теплообменника смешения.
Приведем без вывода передаточные функции теплообменника:
![]() (2.3)
(2.3)
по каналу ![]()
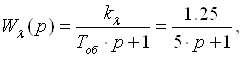 (2.4)
(2.4)
по каналу ![]()
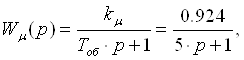 (2.5)
(2.5)
3. Получение математической модели объекта в виде переменных пространство состояний
Одной из распространенных форм математического описания линейных динамических систем являются уравнения следующего вида:
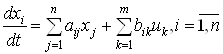 ;
;  (3.1)
(3.1)
Это название связано с тем, что при uk = 0 достаточно задать начальное значение переменных xi, чтобы однозначно определить состояние системы xi(t), y1 для любого момента времени. Модель (3.1) содержит n дифференциальных уравнений 1-го порядка с k управляющими входными воздействиями, а также s алгебраических соотношений для связи выходных переменных системы y с переменными состояния x. Коэффициенты aij, bik, cli называют параметрами модели.
Уравнения (3.1) удобно представить в матричной форме
![]() (3.2)
(3.2)
где X - вектор переменных состояния; U − вектор управляющих (входных) воздействий; Y - вектор выходов; A, B, C − матрицы параметров [2].
Модель (3.2), в сравнении с ранее рассмотренными моделями, формирует дополнительно n переменных внутреннего состояния системы, что увеличивает количество информации об объекте управления.
При этом начальные условия согласуют следующим образом:
 (3.7)
(3.7)
Структурная схема объекта с учетом полученных передаточных функций:
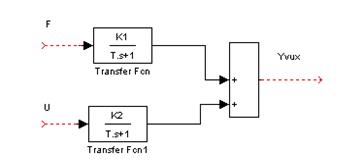
Рисунок 3.1-Структурная схема объекта
Тогда вектор переменных состояния объекта в отклонениях от желаемых базовых значений примет вид:
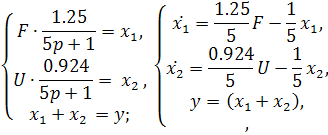
На основе полученных дифференциальных уравнений запишем матрицы А, B и S.
4. Получение дискретной математической модели объекта
Термин “дискретный” еще не сложился. Каждая система управления, в которой присутствует хотя бы один элемент, который не подчиняется непрерывному характеру изменения сигнала, может быть отнесен к классу дискретных систем. Для этих систем характерным является исчезновения сигнала информации хотя бы на небольшом интервале времени. Если эти интервалы устремить к нулю, то можно рассматривать систему как непрерывную. Дискретные системы более общие. В производстве часто технологические процессы непрерывные [2].
Пусть имеется на входе в дискретный элемент какой-то непрерывный сигнал.
Введем период квантования. Заменяем реальное время на кванты т=к*Т к=0,1,…,![]() . Если Т
. Если Т![]() 0 тогда имеем непрерывную
модель. В этом случае можно зафиксировать амплитуды. Кроме квантования по
времени можно квантовать и по вертикали (амплитуде). При таком виде квантования
цифры заносятся в виде “0” и “1”. В случае объединения этих квантований они
называются дискретными.
0 тогда имеем непрерывную
модель. В этом случае можно зафиксировать амплитуды. Кроме квантования по
времени можно квантовать и по вертикали (амплитуде). При таком виде квантования
цифры заносятся в виде “0” и “1”. В случае объединения этих квантований они
называются дискретными.
