

 Реферат: Разработка схемы электронного эквалайзера
Реферат: Разработка схемы электронного эквалайзера
Реферат: Разработка схемы электронного эквалайзера
МИНИСТЕРСТВО ПУТЕЙ СООБЩЕНИЯ РФ
Московский Государственный Университет Путей Сообщения
Кафедра «РЭС»
Курсовой проект по дисциплине:
«Микропроцессорные информационно-управляющие системы связи»
на тему: «Разработка эквалайзера».
Выполнил студ. гр. АТС-531
Проверил
.
Москва 2004
Содержание
| Введение | 3 |
| Задание к курсовому проекту | 4 |
| Цифровая фильтрация | 5 |
| Характеристика FIRF | 6 |
| Определение порядка и синтез коэффициентов цифрового фильтра, входящих в состав эквалайзера | 7 |
| Общая схема DSP-система | 16 |
| Организация интерфейса между устройствами аналогового ввода-вывода, кодеками и DSP-процессорами | 18 |
| Структурная схема ИС ADSP-2111 | 19 |
| Вывод | 22 |
| Список использованной литературы | 23 |
Введение
Цифровой эквалайзер (многополюсный регулятор тембра) – это набор активных фильтров с амплитудами, настраиваемыми на создание формы передаточной функции ряда частотных полос.
Коэффициенты всех фильтров, образующих эквалайзер, хранятся в памяти сигнального процессора и считываются при настройке процессора на пропускание сигнала через соответствующий фильтр.
На одном сигнальном процессоре программно реализуется весь набор цифровых фильтров. Выборки сигнала частично хранятся в кольцевом буфере процессора и постоянно обновляются.
Вычисления проводятся в реальном масштабе времени, поэтому быстродействие процессора должно быть соотнесено с частотой дискретизации обрабатываемого сигнала.
Задание к курсовой работе
В курсовой работе необходимо разработать эквалайзер – устройство, относящееся к цифровой обработке сигналов и применяемое в микропроцессорной технике в системах передачи информации.
В курсовом проекте рекомендуется использовать в качестве базового сигнальный процессор семейства ADSP-21xx фирмы ANALOG DEVICES (США), так как процессоры этой фирмы являются оптимальными по соотношению цена/качество и находят широкое применение в отечественных системах цифровой обработки сигналов.
Границы диапазонов частот фильтра представлены таблице 1:
Таблица 1.
| ФНЧ | ПФ1 | ПФ2 | ПФ3 | ПФ4 | ||||
| Границы диапазонов частот фильтров, кГц | ||||||||
| 0,54 | 0,54 | 1 | 1 | 2,9 | 2,9 | 7 | 7 | 11 |
Цифровая фильтрация
Цифровой фильтр – это линеиная импульсная система, обеспечивающая преобразование цифрового сигнала в соответствии с некоторой предопределенной АЧХ или АФЧХ, если важна начальная фаза. Пусть аналоговый непрерывный сигнал – есть функция времени x(t). Тогда дискретный сигнал x(nT) может быть получен путем взятия отсчетов аналогового ситнала в моменты времени 0,T,2T,…,nT. В операторной форме это можно представить следующим образом:
![]()
Известно:
![]()
Умножение на ![]() в
комплексной области эквивалентно запаздыванию на один такт во временной
области.
в
комплексной области эквивалентно запаздыванию на один такт во временной
области.
Цифровой фильтр описывается разностным уравнением:
a0٠x[n] + a1٠x[n-1] + … + am٠x[n-m] = b0٠y[n] + b1٠y[n-1] + … + bl٠y[n-l],
или уравнением в форме Z-преобразования:
X(Z)٠(a0 + a1٠Z-1 + …+ am٠Z-m) = Y(Z)٠(b0 + b1٠Z-1 + …+ bl٠Z-l).
Как видно из уравнений, при вычислениях в памяти процессора необходимо сохранять два массива постоянных коэффициентов. Массивы значений входных и выходных сигналов обновляются на каждом такте работы системы. Кроме того, для вычисления значения выходного сигнала y[n] необходимо знать все его предыдущие значения и соответствующие им значения входного сигнала (x должен храниться m тактов после поступления).
Таким образом, при вычислении необходим массив из m членов, который сдвигается на каждом такте. Работа с таким массивом занимает много времени, поэтому реально используют кольцевые буферы цифровых сигнальных процессоров.
Для того, чтобы система обладала заданными свойствами, требуется наити коэффициенты разностных уравненийили передаточную функцию. Передаточная функция для импульсных систем в форме Z-преобразования выглядит следующим образом:
Y(p)/X(p)=H(Z).
Различают два вида фильтрации дискретных сигналов-нерекурсивную и рекурсивную. Деиствительная нерекурсивная фильтрация сигнала x(nT) задается выражением:
y[n] =∑ ak٠x[n-k].
Это уравнение фильтра с конечным импульсным откликом. Под импульсным откликом понимаем импульсную переходную функцию k(t) фильтра, то есть его реакцию на функцию.
Деиствительная рекурсивная фильтрация задается выражением:
y[n] =∑ ak٠x[n-k] + ∑ bk٠y[n-k].
Принципиальное отличие этого выражения от предыдущего в том, что в правой части содержатся значения выходного сигнала. Импульсная переходная функция такой системы теоретически не может быть равной нулю. Поэтому она носит название фильтра с бесконечным импульсным откликом(IIRF). В обоих выражениях через:
- ak и bk обозначены коэффициенты фильтрации;
- N и L-порядки фильтрации;
- y(n) –n-ый отсчет дискретного сигнала,получающегося в результате фильтрации.
Следует отметить, что если допустить N=1, то рекурсивная фильтрация всегда может быть заменена нерекурсивной фильтрацией. В частности, рекурсивная фильтрация с N=1. L=1. эквивалентна нерекурсивной фильтрации с N.
Характеристика уравнения фильтра с конечным импульсным откликом.
Уравнения фильтра с конечным импульсным откликом имеют некоторые конструктивные преимущества по сравнению с уравнениями фильтра бесконечных импульсных откликов.
1. Структурная устоичивость.
Разностное уравнение фильтра с конечным импульсным откликом содержит только правую часть. Это значит, что передаточная функция не содержит знаменателя:
H(Z) = ![]() = a0 + a1٠Z-1 + …+ am٠Z-m.
= a0 + a1٠Z-1 + …+ am٠Z-m.
Характеристическое уравнение не содержит корней. Следовательно, при любых значениях коэффициентов ai система будет устоичива к колебениям.
2. Отсутствие накапливаемой ошибки.
В уравнение не входят значения выходного сигнала, а только входного; следовательно, по истечении времени реакции все последствия неправильного задания начальных условий исчезнут.
3. Нерекурсивный фильтр имеет прототип в области непрерывных сигналов, что важно при решении задач с переходом из цифровой области в аналоговую.
4. Для работы с нерекурсивными фильтрами создано больше компьютерных программ. К тому же они работают лучше.
5. Структурная схема фильтра с конечным импульсным откликом представлена на рисунке 1:
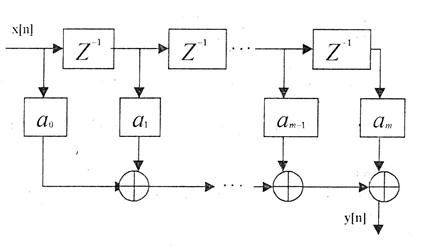
Рис.1. Синтез коэффициентов фильтра с конечным импульсным откликом.
6. Недостатком нерекурсивных фильтров является то, что они вносят принципиальное запаздывание. Чтобы получить первое значение выходного сигнала, необходимо ждать m тактов для заполнения массива входных значений. Поэтому нерекурсивная фильтрация используется в приложениях, не критичных к величине задержки.
Общий порядок синтеза коэффициентов фильтра следующий:
1) задаться амплитудо-частотной (АЧХ) или амплитудо-фазо-частотной (АФЧХ) характеристиками фильтра;
2) получить импульсную переходную характеристику фильтра k(t), для чего необходимо взять обратное преобразование Фурье от АЧХ или обратное преобразование Лапласа от АФЧХ;
3) найти коэффициенты фильтра, взяв дискретные значения импульсной переходной функции k(nT).
Определение порядка и синтез коэффициентов
Цифровых фильтров, входящих в состав эквалайзера.
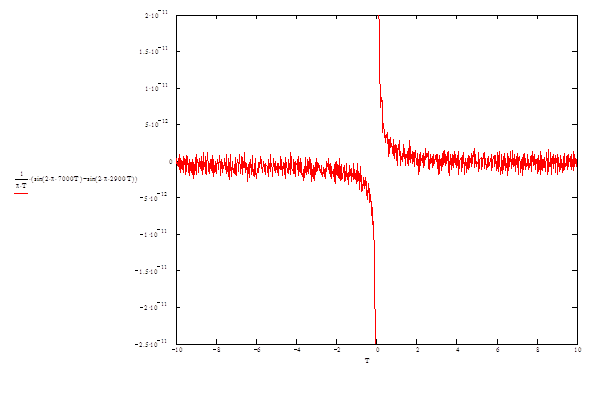
Предположим, что ФЧХ равна 0. Тогда для получения импульсной переходной функции полосового фильтра с полосой пропускания fi-1 ÷ fi достаточно взять обратное преобразование Фурье от АЧХ:
k(t) = 1/2π∫A(ω) ٠ejωtdω = A0/2π∫ejωtdω - A0/2π∫ejωtdω =
=A0/πt(sinωi٠t - sinωi-1٠t), где ωi = 2π fi.
Для исключения погрешности дискретизации выберем частоту дискретизации в два раза выше верхней частоты общей полосы пропускания эквалайзера:
Tд = 2π/ωд = 2π/2ωn = π/ωn = π/(2٠π٠13) = 0,0385 мс.
Продискретизировав импульсную переходную функцию с периодом дискретизации, получим решетчатую функцию k(nTд).
Импульсная переходная функция начинается слева от начала координат. Это невозможно с физической точки зрения, так как нельзя реагировать на событие, которое еще не произошло. Чтобы сместить функцию по оси абсцисс вправо, необходимо внести запаздывание. Однако, если импульсная переходная функция бесконечна, то необходимо внести бесконечное запаздывание, что невозможно. Реально берут 2N+1 отсчетов решетчатой функции, что соответствует запаздыванию на NTд.
В рамках курсового проекта порядок фильтра ограничивается следующей величиной:
N ≥ tдоп/Tд,
где tдоп – время, через которое k(t) ≤ 0,1٠k0,
k0 = k(t)max.
Фильтр нижних частот (ФНЧ).
Частота среза фильтра: ![]() кГц;
кГц;
![]() рад/с;
рад/с;
Частота дискретизации ![]() кГц;
кГц;
Период дискретизации фильтра для определения порядка данного фильтра:
![]() мс.
мс.
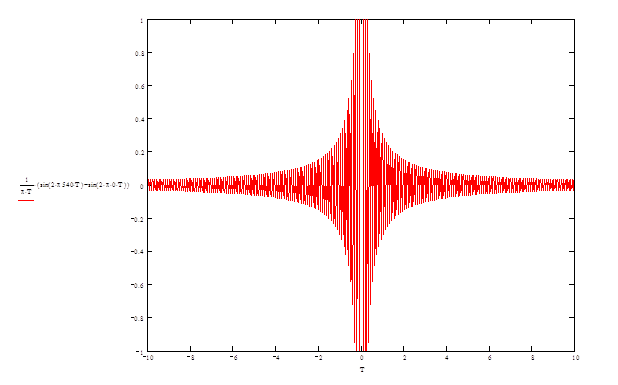
Переходная функция ![]() :
:
![]() .
.
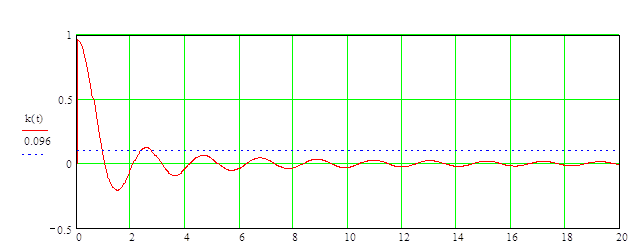
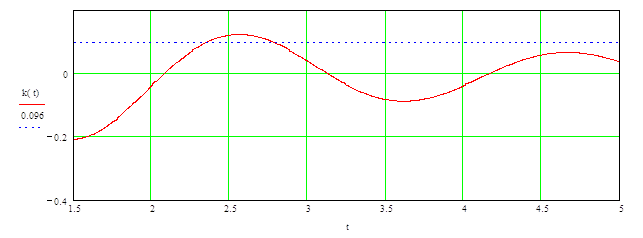 Рис.3. Переходная функция ФНЧ.
Рис.3. Переходная функция ФНЧ.
![]()
![]()
![]()
![]()
Определим коэффициенты фильтра ФНЧ:
Таблица 2.
n a n a n a n a
| 0 | -0,050849552 | 21 | 0,05213266 | 41 | -0,057902897 | 61 | 0,066693601 |
| 1 | -0,047381452 | 22 | 0,044603043 | 42 | -0,046254347 | 62 | 0,047455709 |
| 2 | -0,042531604 | 23 | 0,035644122 | 43 | -0,032920949 | 63 | 0,02589646 |
| 3 | -0,036405607 | 24 | 0,025465445 | 44 | -0,018209385 | 64 | 0,002473637 |
| 4 | -0,029146011 | 25 | 0,014314951 | 45 | -0,00247349 | 65 | -0,022284955 |
| 5 | -0,020929191 | 26 | 0,002473283 | 46 | 0,013893446 | 66 | -0,047790903 |
| 6 | -0,011961243 | 27 | -0,009752894 | 47 | 0,030467601 | 67 | -0,073406266 |
| 7 | -0,002473018 | 28 | -0,02203843 | 48 | 0,046804595 | 68 | -0,098456107 |
| 8 | 0,007285626 | 29 | -0,034047894 | 49 | 0,062450287 | 69 | -0,122242231 |
| 9 | 0,017052183 | 30 | -0,045444252 | 50 | 0,07695216 | 70 | -0,144057845 |
| 10 | 0,026558333 | 31 | -0,055897815 | 51 | 0,089871011 | 71 | -0,163202823 |
| 11 | 0,035537068 | 32 | -0,065095206 | 52 | 0,100792694 | 72 | -0,178999256 |
| 12 | 0,04372993 | 33 | -0,072748139 | 53 | 0,109339601 | 73 | -0,190806934 |
| 13 | 0,050894174 | 34 | -0,078601768 | 54 | 0,115181622 | 74 | -0,198038431 |
| 14 | 0,056809654 | 35 | -0,082442378 | 55 | 0,118046281 | 75 | -0,200173423 |
| 15 | 0,061285263 | 36 | -0,084104208 | 56 | 0,117727803 | 76 | -0,196771935 |
| 16 | 0,06416472 | 37 | -0,083475205 | 57 | 0,114094848 | 77 | -0,187486186 |
| 17 | 0,065331569 | 38 | -0,080501546 | 58 | 0,107096699 | 78 | -0,172070753 |
| 18 | 0,064713212 | 39 | -0,075190761 | 59 | 0,096767723 | 79 | -0,150390796 |
| 19 | 0,062283872 | 40 | -0,067613365 | 60 | 0,083229939 | 80 | -0,122428134 |
| 20 | 0,058066372 |
|
|||||
n a
