

 Реферат: Автоматизированное управление в технических системах
Реферат: Автоматизированное управление в технических системах
 (3.13)
(3.13)

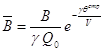
При постоянной скорости расходования запасов V среднее время хранения единицы запасенного продукта равно
![]() (3.14.)
(3.14.)
Это выражение отличается от значения tсp для предыдущей модели наличием постоянного слагаемого Qcp/V . За цикл tQ удельные затраты на хранение единицы запасенного продукта, руб./шт., определяются по формуле
![]() (3.15.)
(3.15.)
Удельные затраты за цикл на создание в запас единицы продукта, руб./шт., равны по-прежнему
![]() (3.16.)
(3.16.)
В (3.16) не входят расходы на образование QCTP, поскольку страховой запас создается однажды и циклически не возобновляется. Дополнительные расходы на запасание и хранение единицы, руб./шт., для заказа объемом Q составляют
![]() (3.17.)
(3.17.)
Переменная С. в (3.17) имеет экстремум по Q и величина экстремального значения C0 , очевидно, отличается от (3.11) на постоя ную величину bQстр/V
Приравняв нулю производную dc/dQ, , получим:
![]()
откуда ![]() (3.18.)
(3.18.)
Следовательно, оптимальный объем заказываемой партии в модели со страховым запасом такой же, как и для модели без страхового запаса. Это означает, что и выражение для оптималвного интервала восполнения заказов имеет прежний вид
![]() (3.19.)
(3.19.)
Величина удельных дополнительных расходов Cо , соответствую щих Q0 равна
![]() (3.20.)
(3.20.)
что отличается лишь постоянным слагаемым bqстр/V от расходов для модели с
нулевым страховым запасом.
В модели страховых запасов весьма существенным является вопрос определения оптимального уровня страхового запаса Qoстр Для определения Qстр необходимы предположения о вероятностном поведении задержек пополнения запасов Dt и потерях заказчика в результате этих задержек.
Предположим, что задержка Dt в выполнении данного заказа не зависит от задержек выполнения других заказов. Кроме того, предположим, что вероятность того, что эта задержка превзойдет время t , выражается экспоненциальной зависимостью, т.е.
Тогда 
Плотность вероятности случаной величины Dt имеет вид
![]()
Для экспоненциального распределения ![]() , ед. вр. и, следовательно, g
выражается в 1/ед. вр. Физически параметр g
соответствует среднему количеству задержек в единицу времени, а величина 1/g есть средняя продолжительность задержки Dt .
Предположим далее, что потери заказчика в единицу времени простоя равны В
руб,/ед.вр.
, ед. вр. и, следовательно, g
выражается в 1/ед. вр. Физически параметр g
соответствует среднему количеству задержек в единицу времени, а величина 1/g есть средняя продолжительность задержки Dt .
Предположим далее, что потери заказчика в единицу времени простоя равны В
руб,/ед.вр.
Время, в течение которого хватит страхового запаса для работы с прежним расходом V , равно
![]()
Если задержка Dt > tстр , то заказчик начинает нести потери вследствие простоя. Величина этих потерь равна В(t-tстр). Величина средних потерь заказчика вследствие простоев определяется математическим ожиданием случайной величины которое можно представить в виде
![]()
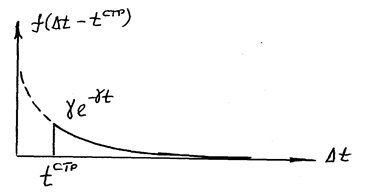
Рис. 3.4
Плотность вероятности случайной величины Dt > tстр изображена на рис.3.4. Следовательно, для В можно записать

В расчете на единицу заказанного продукта удельные средние потери, руб./шт., вследствие простоев равны
Дополнительные удельные расходы, руб./шт., на хранение единицы страхового запаса есть
![]()
Таким образом, общие удельные (на единицу продукта) расходы по хранению страхового запаса плюс средняя величина удельных потерь за счет возможных задержек выполнения заказов определяются выражением
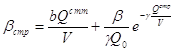
Из условия можно найти оптимальную величину страхового запаса
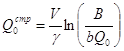
Ясно, что размер потерь от простоя объекта в единицу времени должен превышать расходы на хранение запаса объема Q0 в единицу времени, иначе бы эксплуатация объекта стала делом невыгодным, а величина страхового запаса Qctp0 получилась бы отрицательной.
Кроме рассмотренных возможны и более сложные модели образования запасов, например: при различных уровнях оптовых закупочных цен; при ограничениях на оборотные средства, размер складов; при необходимости создавать многономенклатурные запасы;
при вероятностном характере спроса и потребления запасаемого, продукта и т.д.
4. Достижение каких целей преследуется при оперативном управлении?
Цели и задачи оперативного управления производством. Эффект от автоматизации оперативного управления. Информационное обеспечение оперативного управления. Постановка задачи оперативного управления как выдачи составления расписаний. Критерии оптимизации расписаний. Задача составления расписаний как комбинаторная задача. Методы решения задачи составлений расписаний.
Оперативное управление представляет собой процесс временной и пространственной организации производства. Структурно-оперативное управление подразделяется на три группы задач, взаимосвязь между которыми образует иерархическую трехуровневую структуру.
На третьем (нижнем) уровне решаются задачи управления отдельными технологическими операциями и их элементами, например, поддержание режимов резания металла в металлообрабатывающих системах, выполнение движения робота, обеспечение заданных параметров движения транспортных средств, конвейерной ленты транспортеры и т.д.
Как правило, в автоматическом режиме эти функции выполняются регуляторами, являющимися элементами систем автоматического управления.
На втором этапе решаются задачи локального управления оборудования, основные функции которых заключаются в выполнении последовательности технологических операций в соответствии с заданной программой (логическое управление). Программа содержит такую информацию о значениях технологических параметров операций, которые используются регуляторами третьего уровня.
На первом (верхнем) уровне решаются задачи управления материальными потоками, проходящими через технологическое подразделение.
Можно выделить три основные задачи оперативного управления: оперативное (календарное) планирование, задача составления расписаний, оперативный контроль и корректировка планов.
5. Как разрешаются конфликты в двухуровневой системе?
Понятие многоуровневой иерархической структуры управления нельзя определить одной сжатой краткой формулировкой. Исчерпывающее определение потребовало бы перечисления всех возможных альтернатив. Поэтому мы отметим лишь несколько существенных характеристик, присущих всем иерархическим системам. К ним относятся: последовательное вертикальное расположение подсистем, составляющих данную систему (вертикальная декомпозиция) ; приоритет действий или право вмешательства подсистем верхнего уровня; зависимость действий подсистем верхнего уровня от фактического исполнения нижними уровнями своих функций.
Существуют три основных вида описания сложных иерархических систем характеризующиеся уровнями абстрагирования:
страта, слой, эшелон. Стратифицированное описание или стратифицированная система задается семейством моделей, каждая из которых описывает поведение системы с точки зрения различных уровней абстрагирования.
Выбор страт, в терминах которых описывается система, зависит от исследователя, его знаний и заинтересованности в деятельности системы. В общем случае стратификация неразрывно связана с интерпретацией производимых системой действий. Аспекты описания функционирования системы на различных стратах в общем случае не связаны между собой, поэтому принципы и законы, используемые для характеристики системы на любой страте, в общем случае не могут быть выведены из принципов, используемых на других стратах. Существует ассимметричная зависимость между условиями функционирования системы на различных стратах. Требования, предъявляемые к работе системы на любой страте, выступают как условия или ограничения деятельности на нижестоящих стратах.
На каждой страте имеется свой собственный набор терминов, концепций и принципов. Понимание системы возрастает при последовательном переходе от одной страты к другой: чем ниже мы спускаемся по иерархии, тем более детальным становится раскрытие системы, чем выше мы поднимаемся, том яснее становится смысл и значение всей системы.
Другое понятие иерархического подхода относится к процессам принятия сложных решений. Почти в любой реальной ситуации принятая сложных решений существуют две предельно простые, но чрезвычайно важные особенности:
- когда приходит время принимать решения, принятие и выполнение решения нельзя откладывать;
- неясность относительно последствий различных альтернативных действий и отсутствие достаточных знаний о имеющихся связях препятствуют достаточно полному формализованному описанию ситуации, необходимому для
рационального выбора действий.
Для решения сложной задачи принятия решения, последняя расчленяется (декомпозируется) на более мелкие подпроблемы, так что решение всех подпроблем позволяет решить исходную проблему. Такая иерархическая структура называется иерерхической структурой слоев принятия решения. Иерархическая структура состоит из трех уровней (слоев).
1. Слой выбора. Задача этого слоя - выбор способа действий m. Принимающий решение элемент на уровне этого слоя получает информацию, применяя тот или иной алгоритм переработки, находит нужный способ действий.
2. Слой адаптации. Задача этого слоя - конкретизация множества неопределенностей U , с которым имеет дело слой выбора. Назначение второго слоя - сужение множества неопределенностей.
3. Слой самоорганизации. На уровне этого слоя происходит выбор структуры, функций и стратегий будущей системы. Многоуровневая организационная иерархия подразумевает, что:
I. Система состоит из семейства четко выделенных взаимодействующих подсистем;
2. Некоторые из подсистем являются принимающими решения, элементами;
3. принимающие решения элементы располагаются иерархически в том смысле, что некоторые из них находятся под влиянием или управляются другими решающими элементами.
Каждая из трех приведенных форм описания иерархических структур имеет свою область.
Применение: концепция страт введена для целей моделирования, концепция слоев - для вертикальной декомпозиции решаемой задачи над подзадачи, концепция эшелонов относится к взаимной связи между образующие систему элементами принятия решения,
Несмотря на различие, существуют и общие для всех трех понятий черты:
1. Элемент верхнего уровня имеет дело с более крупными подсистемами или с более широкими аспектами поведения системы в целом.
2. Период принятия решения для элемента верхнего уровня больше, чем для элементов нижних уровней.
3. .Элемент верхнего уровня имеет дело с более медленными аспектами поведения всей системы.
4. Описания и проблемы на верхних уровнях менее структурированы, содержат больше неопределенностей и более трудны для количественной формализации.
Для теории многоуровневых систем двухуровневая система принятия решений представляет специфический интерес:
1. это простейший тип систем, в котором проявляются все наиболее существенные характеристики многоуровневой системы;
2. более сложные многоуровневые системы могут быть построены из двухуровневых подсистем, как из блоков.
Взаимодействие между вышестоящим элементом и каждым из нижестоящих элементов таково, что действие одного из них зависит от действий другого, причем эти взаимоотношения являются динамическими и изменяются во времени.
Существуют два возможных момента времени для координации нижестоящих элементов:
1. вмешательство до принятия решения;
2. вмешательство после принятия решения и следующие варианты организации взаимодействия элементов нижестоящего уровня:
- координирование путем прогнозирования взаимодействий;
- координирование путем оценки взаимодействий;
- координирование путем "развязывания" взаимодействий;
- координирование типа "наделение ответственностью";
- координирование путем "создания коалиций".
Координация, сама представляющая собой сложную для решения проблему, имеет два сложных направления: направление самоорганизации (изменение структуры) и направление управления (выбор координирующего вмешательства при фиксированной структуре) .
Изменения функции и взаимосвязей в результате самоорганизаций, используемых в процессе координации называется модификацией. Различают два вида модификаций: модификация целей и модификация образов (для выбранного способа координации).
Проблему координации в многоуровневой системе с достаточной общностью можно рассмотреть на примере двухуровневой системы (рис.5.1.), где приняты следующие обозначения.
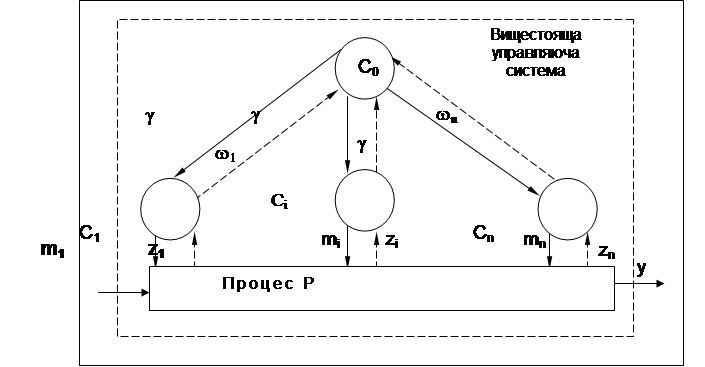
Рис. 5.1
Р – процесс (управляющая система)
С1…Сn – системы управления нижнего уровня
С0 – управляющая система (координатор)
m(m(M) - управляющие сигналы (входы)
M - множество управляющих сигналов •
w(wÎW ) - сигналы входы, представляющие собой внешние возмущения, поступающие из среды
у( у( Y) - выход процесса Р
У - множество входов процесса Р
g(gÎj) - координирующий сигнал
Zi - множество информационных сигналов (сигналов обратной связи).
Тогда в системе выполняются следующие соотношения в виде отображения P:
M x W ® Y; Ci: j x Zi ®Mi; C0:V®j;
¦i : M x W x Y® Zi; ¦0 : j x Z x M® w
С учетом полученных отображений можно записать уравнение функции взаимодействия подпроцессов
K(m, w)=H(m,P(m, w))
P(m, w)=(m,k(m, w),w)
Взаимосвязь между процессом Р и "развязанными" подпроцессами, представленными блоком Р и связующими функциями показана на рис.5.2.
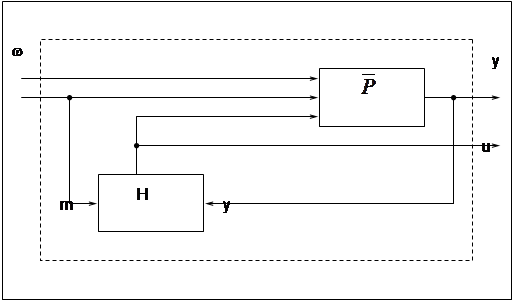
Рис.5.2
Сделаем несколько замечаний относительно процесса и его представления через процессы.
1. Каждая локальная управляющая система C1,C2…Cn заинтересована главным образом в каком нибудь одном направлении процесса, хотя окончательный результат ее действий зависит от всего процесса.
2. Связующие функции Hi предопределяют характер декомпозиции процесса, и обычно их следует выбирать по возможности простыми.
3. Функция взаимодействия К отражает весь процесс Р, так как для любого управляющего сигнала m и возмущающего воздействия W, к- определяет (поскольку k(m,w)=U связующие сигналы, которые поступают на вход подпроцессов Pi и кроме того, U = H(m,P(m,w) К может также рассматриваться как отображение подпроцесса. Рис.5.3
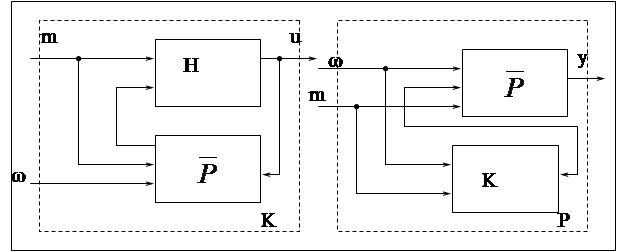 |
Рис. 5.3
Управляющая система рассматривается как система, составленная решающих элементов и реализаторов, связанных каскадно и может рассматриваться как задача межуровневой координации. Для рассмотрения данного раздела следует восстановить основные понятия алгебраической теории множеств.
6. Как нумеруются вершины сетевого графика?
Сетевой график - графическое изображение сетевой модели комплекса операций в виде стрелок и кружков.
Порядок построения сетевых графиков определяется принятой технологией и организацией работ.
Сетевые графики только отражают существующую или проектируемую очередность и взаимосвязь выполнения работ. При построении сетевой модели необходимо учитывать определенные требования.
Эти требования являются общими для всех сетевых моделей.
Первое: Никакая работа не может быть начата, пока все предшествующие ей работы не будут завершены.
Второе: в сетевых графиках с ориентацией на события (работы) в каждое событие должно входить и исходить из него не менее одной работы. Не допустимы тупиковые события, из которых не выходит ни одна работа или в которые не входит ни одна работа.
Третье: в сетевом графике не должно быть замкнутых контуров.
Четвертое: для построения параллельных, одновременно выполняемых работ в сетевых графиках с ориентацией на события следует вводить дополнительное событие и фиктивную работу.
Пятое: для изображения двух дифференцированно зависимых работ необходимо в сетях расчленить данные работы путем ввода дополнительного события и указать их точную зависимость от предшествующих работ дополнительной фиктивной работой.
Шестое: в условиях сложной работы, когда выполнение какой/то ее части позволяет начать одну или несколько других работ, следует данную работу разделить на последовательно выполняемые, от которых берут начало другие работы.
Задачи
1. Предприятию требуется в год 56000 деталей определенного типа, используемых как комплектующие изделия. Поставщики могут поставить ежедневно 400 деталей. Расходы на оформление заказов на отдельные партии деталей составляют 650 руб. Стоимость хранения 1000 деталей в месяц — 600 руб.
Требуется определить оптимальный объем затариваемой партии
деталей Q0 , дискретность возобновления заказов ![]() и суммарные годовые расходы
Сå за счет создания и
содержания запасов
и суммарные годовые расходы
Сå за счет создания и
содержания запасов
Дано:
А = 56000
В = 400
С = 650
Д = 1000
Е = 600
Решение:
В рассмотренных понятиях условия задачи выглядит следующим образом:
Период Т = 1 год; расходы на хранение одной детали в месяц b = 0,6 руб./дет. мес.; скорость расходования деталей V = 56000/12 = 4666 дет/мес.; скорость поставки деталей
U = 400 * 30 = 12000 дет. мес.
Определим оптимальный размер заказа:
 дет.
дет.
Оптимальный интервал между соседними заказами:
 мес.
мес.
Удельные суммарные расходы на создание и удержание запасов:
 руб./дет.
руб./дет.
Суммарные годовые расходы на оборудование и хранение запасов:
Сå = 0,396 · 56000 = 221 95 руб./год.
2. Предприятие в течение года потребляет «А» комплектующих изделий определенного типа. Поставщик ив течении декады может поставить «Б» изделий, однако в среднем на протяжении квартала допускается «В» отклонений от графика поставок. Суточный простой обходится предприятию в «Г» руб. Содержание «Д» изделий на складе в течение месяца обходится в «Е» руб. Чтобы уменьшить потери от простоев, предприятие создает страховые запасы. Необходимо определить оптимальный объем страхового запаса и суммарные расходы на содержание запасов в течение года, если оформление заказа обходится в «Ж» руб.
Дано:
А = 56000 изд.
Б = 2600 изд.
В = 30 откл.
Г = 10400 руб.
Д = 2 5 изд.
Е = 0,6 руб.
Ж = 80 руб.
Решение:
В приняты обозначениях условие задачи можно представить следующим образом:
Скорость расходования запаса:
![]() шт./мес.
шт./мес.
Скорость поставки запаса
![]() шт./мес.
шт./мес.
Среднее количество задержек в ед. времени
![]() и
и ![]()
![]() руб./ мес.
руб./ мес.
![]() руб./шт. мес.
руб./шт. мес.
а = 80 руб.
Определим оптимальный объем заказа:
![]() шт.
шт.
Определим оптимальный цикл:
![]() мес.
мес.
Определим оптимальную величину страхового запаса:
 шт.
шт.
Определим величину удельных дополнительных затрат:
![]() руб./ист.
руб./ист.
Суммарные затраты за год:
![]() руб.
руб.
