

 Курсовая работа: Генетические алгоритмы в задаче оптимизации действительных параметров
Курсовая работа: Генетические алгоритмы в задаче оптимизации действительных параметров
1. Начальная популяция ![]() — конечный набор допустимых
решений задачи. Эти решения могут быть выбраны случайным образом или получены с
помощью вероятностных жадных алгоритмов. Как мы увидим ниже, выбор начальной популяции
не имеет значения для сходимости процесса, однако формирование "хорошей"
начальной популяции (например, из множества локальных оптимумов) может заметно сократить
время достижения глобального оптимума. Это отличается от стандартных методов, когда
начальное состояние всегда одно и то же.
— конечный набор допустимых
решений задачи. Эти решения могут быть выбраны случайным образом или получены с
помощью вероятностных жадных алгоритмов. Как мы увидим ниже, выбор начальной популяции
не имеет значения для сходимости процесса, однако формирование "хорошей"
начальной популяции (например, из множества локальных оптимумов) может заметно сократить
время достижения глобального оптимума. Это отличается от стандартных методов, когда
начальное состояние всегда одно и то же.
2.
Каждая хромосома популяции xi оценивается функцией эффективности
![]() , и ей в соответствии
с этой оценкой присваивается вероятность воспроизведения Pi.- Вычисление
коэффициента выживаемости (fitness).
, и ей в соответствии
с этой оценкой присваивается вероятность воспроизведения Pi.- Вычисление
коэффициента выживаемости (fitness).
3. В соответствии с вероятностями воспроизведения Pi генерируется новая популяция хромосом, причём с большей вероятностью воспроизводятся наиболее эффективные элементы. Популяция следующего поколения в большинстве реализаций генетических алгоритмов содержит столько же особей, сколько начальная, но в силу отбора приспособленность в ней в среднем выше. Воспроизведение осуществляется при помощи генетических операторов кроссинговера (скрещивание) и мутации.
4. Если найдено удовлетворительное решение, процесс останавливается, иначе продолжается с шага 2.
Жизненный цикл популяции - это несколько случайных скрещиваний и мутаций, в результате которых к популяции добавляется какое-то количество новых индивидуумов.
2.3 Генетические операторы
Стандартные операторы для всех типов генетических алгоритмов это: селекция, скрещивание и мутация.
Оператор отбора [селекция]. Служит для создания промежуточной популяции
![]() . В промежуточную
популяцию копируются хромосомы из текущей популяции в соответствии с их вероятностью
воспроизведения Pi. Существуют различные
схемы отбора, самая популярная из них – пропорциональный отбор:
. В промежуточную
популяцию копируются хромосомы из текущей популяции в соответствии с их вероятностью
воспроизведения Pi. Существуют различные
схемы отбора, самая популярная из них – пропорциональный отбор:  .
.
Простейший пропорциональный отбор - рулетка (roulette-wheel selection, Goldberg, 1989c) - отбирает особей с помощью n "запусков" рулетки. Колесо рулетки содержит по одному сектору для каждого члена популяции. Размер i-ого сектора пропорционален соответствующей величине Ps(i). При таком отборе члены популяции с более высокой приспособленностью с большей вероятность будут чаще выбираться, чем особи с низкой приспособленностью.
Для устранения зависимости от положительных значений и влияний больших чисел используется масштабирование оценок или ранжирование.
При турнирной селекции формируется случайное подмножество из элементов популяции и среди них выбирается один элемент с наибольшим значением целевой функции. Турнирный отбор реализует n турниров, чтобы выбрать n особей. Каждый турнир построен на выборке k элементов из популяции, и выбора лучшей особи среди них. Наиболее распространен турнирный отбор с k=2.
Турнирная селекция имеет определенные преимущества перед пропорциональной, так как не теряет своей избирательности, когда в ходе эволюции все элементы популяции становятся примерно равными по значению целевой функции. Пропорциональный отбор не гарантирует сохранности лучших результатов, достигнутых в какой-либо популяции, и для преодоления такого явления используется элитный отбор - несколько лучших индивидуумов переходят в следующее поколение без изменений, не участвуя в кроссинговерe и отборе.
Операторы селекции строятся таким образом, чтобы с ненулевой вероятностью любой элемент популяции мог бы быть выбран в качестве одного из родителей. Более того, допускается ситуация, когда оба родителя представлены одним и тем же элементом популяции.
В любом случае каждое следующее поколение будет в среднем лучше предыдущего. Когда приспособленность индивидуумов перестает заметно увеличиваться, процесс останавливают и в качестве решения задачи оптимизации берут наилучшего из найденных индивидуумов.
Отбор в генетическом алгоритме тесно связан с принципами естественного отбора в природе следующим образом:
Таблица
| Приспособленность индивидуума | Значение целевой функции на этом индивидууме. |
| Выживание наиболее приспособленных | Популяция следующего поколения формируется в соответствии с целевой функцией. Чем приспособленнее индивидуум, тем больше вероятность его участия в кроссовере, т.е. размножении. |
Воспроизведение. Служит для создания следующей популяции на основе промежуточной ![]() при помощи операторов
кроссинговера и мутации, которые имеют случайный характер. Каждому элементу промежуточной
популяции
при помощи операторов
кроссинговера и мутации, которые имеют случайный характер. Каждому элементу промежуточной
популяции ![]() ,
если надо подбирается партнёр и вновь созданная хромосома помещается в новую популяцию.
,
если надо подбирается партнёр и вновь созданная хромосома помещается в новую популяцию.
Оператор кроссинговера (в литературе по генетическим алгоритмам также употребляется название кроссовер или скрещивание) - операция, при которой две хромосомы обмениваются своими частями. Производит обмен генетического материала между родителями для получения потомков. Кроссинговер смешивает "генетический материал" двух родителей, причем можно ожидать, что приспособленность родителей выше средней в предыдущем поколении, так как они только что прошли очередной раунд борьбы за выживание. Это аналогично соперничеству настоящих живых существ, где лишь сильнейшим удается передать свои (предположительно хорошие) гены следующему поколению. Важно, что кроссинговер может порождать новые хромосомы, ранее не встречавшиеся в популяции. Простейший одноточечный кроссинговер (рис. 3) производит обмен частями, на которые хромосома разбивается точкой кроссинговера. Одноточечный кроссовер работает следующим образом. Сначала, случайным образом выбирается одна из l-1 точек разрыва. Точка разрыва - участок между соседними битами в строке. Обе родительские структуры разрываются на два сегмента по этой точке. Затем, соответствующие сегменты различных родителей склеиваются и получаются два генотипа потомков. Двухточечный кроссинговер обменивает кусок строки, попавшей между двумя точками. Предельным случаем является равномерный кроссинговер, в результате которого все биты хромосом обмениваются с некоторой вероятностью. Этот оператор служит для исследования новых областей пространства и улучшения существующих (приспособление).
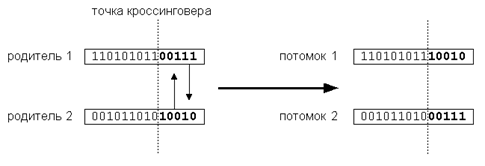
Рис. 3. Кроссинговер
Все типы кроссинговера обладают общим свойством: они контролируют баланс между дальнейшим использованием уже найденных хороших подобластей пространства и исследованием новых подобластей. Достигается это за счет неразрушения общих блоков внутри хромосом-родителей, сохраняющем "хорошие" паттерны, и одновременном исследовании новых областей в результате обмена частями строк (хромосом). Совместное использование отбора и кроссинговера приводит к тому, что области пространства, обладающие лучшей средней оптимальностью, содержат больше элементов популяции, чем другие. Таким образом, эволюция популяции направляется к областям, содержащим оптимум с большей вероятностью, чем другие.
Оператор мутации [Случайное изменение одной или нескольких позиций в хромосоме]
К каждому биту хромосомы с небольшой вероятностью ![]() применяется мутация – т.е. бит (аллель)
изменяет значение (для двоичного представления - на противоположный) - (рис. 4).
Мутация нужна для расширения пространства поиска (исследование) и предотвращения
невосстановимой потери бит в аллелях. Мутации вносят новизну и предотвращают невосстановимую
потерю аллелей в определенных позициях, которые не могут быть восстановлены кроссинговером,
тем самым ограничивая преждевременное сжатие пространства поиска. Циклическое применение
последовательности отбор-мутация направляет эволюцию элементов популяции к наиболее
хорошим точкам пространства поиска.
применяется мутация – т.е. бит (аллель)
изменяет значение (для двоичного представления - на противоположный) - (рис. 4).
Мутация нужна для расширения пространства поиска (исследование) и предотвращения
невосстановимой потери бит в аллелях. Мутации вносят новизну и предотвращают невосстановимую
потерю аллелей в определенных позициях, которые не могут быть восстановлены кроссинговером,
тем самым ограничивая преждевременное сжатие пространства поиска. Циклическое применение
последовательности отбор-мутация направляет эволюцию элементов популяции к наиболее
хорошим точкам пространства поиска.
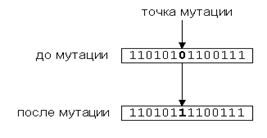
Рис. 4. Мутация
Существует также оператор воспроизведения, называемый инверсией, который заключается в реверсировании бит между двумя случайными позициями, однако для большинства задач он не имеет практического смысла и поэтому неэффективен.

Рис. 5. Блок-схема генетического алгоритма
Работа ГА представляет собой итерационный процесс, который продолжается до тех пор, пока не выполнятся заданное число поколений или какой-либо иной критерий останова. На каждом поколении ГА реализуется отбор пропорционально приспособленности, кроссовер и мутация. Блок-схема генетического алгоритма достаточно проста (рис.5)
2.4. Достоинства и недостатки стандартных и генетических методов
Генетический алгоритм - новейший, но не единственно возможный способ решения задач оптимизации. С давних пор известны два основных пути решения таких задач - переборный и локально-градиентный. У этих методов свои достоинства и недостатки, и в каждом конкретном случае следует подумать, какой из них выбрать.

Рис.
Рассмотрим достоинства и недостатки стандартных и генетических методов на примере классической задачи коммивояжера. Суть задачи состоит в том, чтобы найти кратчайший замкнутый путь обхода нескольких городов, заданных своими координатами. Оказывается, что уже для 30 городов поиск оптимального пути представляет собой сложную задачу, побудившую развитие различных новых методов (в том числе нейросетей и генетических алгоритмов).
Каждый вариант решения (для 30 городов) - это числовая строка, где на j-ом месте стоит номер j-ого по порядку обхода города. Таким образом, в этой задаче 30 параметров, причем не все комбинации значений допустимы. Естественно, первой идеей является полный перебор всех вариантов обхода.
Рис
Переборный метод наиболее прост по своей сути и тривиален в программировании. Для поиска оптимального решения (точки максимума целевой функции) требуется последовательно вычислить значения целевой функции во всех возможных точках, запоминая максимальное из них. Недостатком этого метода является большая вычислительная стоимость. В частности, в задаче коммивояжера потребуется просчитать длины более 1030 вариантов путей, что совершенно нереально. Однако, если перебор всех вариантов за разумное время возможен, то можно быть абсолютно уверенным в том, что найденное решение действительно оптимально.
Рис.
Второй популярный способ основан на методе градиентного спуска. При этом вначале выбираются некоторые случайные значения параметров, а затем эти значения постепенно изменяют, добиваясь наибольшей скорости роста целевой функции. Достигнув локального максимума, такой алгоритм останавливается, поэтому для поиска глобального оптимума потребуются дополнительные усилия.
Градиентные методы работают очень быстро, но не гарантируют оптимальности найденного решения. Они идеальны для применения в так называемых унимодальных задачах, где целевая функция имеет единственный локальный максимум (он же - глобальный). Легко видеть, что задача коммивояжера унимодальной не является.

Рис.
Типичная практическая задача, как правило, мультимодальна и многомерна, то есть содержит много параметров. Для таких задач не существует ни одного универсального метода, который позволял бы достаточно быстро найти абсолютно точное решение.
Однако, комбинируя переборный и градиентный методы, можно надеяться получить хотя бы приближенное решение, точность которого будет возрастать при увеличении времени расчета.
Генетический алгоритм представляет собой именно такой комбинированный метод. Механизмы скрещивания и мутации в каком-то смысле реализуют переборную часть метода, а отбор лучших решений - градиентный спуск.

Рис
На рисунке показано, что такая комбинация позволяет обеспечить устойчиво хорошую эффективность генетического поиска для любых типов задач.
Итак, если на некотором множестве задана сложная функция от нескольких переменных, то генетический алгоритм - это программа, которая за разумное время находит точку, где значение функции достаточно близко к максимально возможному. Выбирая приемлемое время расчета, мы получим одно из лучших решений, которые вообще возможно получить за это время.
Однако, ГА, как и другие методы эволюционных вычислений, не гарантирует обнаружения глобального решения за полиномиальное время. ГА-мы не гарантируют и того, что глобальное решение будет найдено, но они хороши для поиска "достаточно хорошего" решения задачи "достаточно быстро". Там, где задача может быть решена специальными методам, почти всегда такие методы будут эффективнее ГА и в быстродействии и в точность найденных решений. Главным же преимуществом ГА-мов является то, что они могут применяться даже на сложных задачах, там, где не существует никаких специальных методов. Даже там, где хорошо работаю существующие методики, можно достигнуть улучшения сочетанием их с ГА.
3. Влияние параметров генетического алгоритма на эффективность поиска
3.1 Операторы кроссовера и мутации
Наиболее традиционным подходом является отход от традиционной схемы "размножения", используемой в большинстве реализованных ГА-мах и повторяющих классическую схему. Классическая схема предполагает ограничение численности потомков путем использования так называемой вероятности кроссовера. Такая модель придает величине, соответствующей численности потомков, вообще говоря, недетерминированный характер. Есть метод предлагающий отойти от вероятности кроссовера и использовать фиксированное число брачных пар на каждом поколении, при этом каждая брачная пара "дает" двух потомков. Такой подход хорош тем, что делает процесс поиска более управляемым и предсказуемым в смысле вычислительных затрат.
В качестве генетических операторов получения новых генотипов потомков, используя генетическую информацию хромосомных наборов родителей мы применяем два типа кроссоверов - одно- и двухточечный. Вычислительные эксперименты показали, что даже для простых функций нельзя говорить о преимуществе того или иного оператора. Более того, было показано, что использование механизма случайного выбора одно- или двух точечного кроссовера для каждой конкретной брачной пары подчас оказывается более эффективным, чем детерминированный подход к выбору кроссоверов, поскольку достаточно трудно определить который из двух операторов более подходит для каждого конкретного ландшафта приспособленности. Использование же случайного выбора преследовало целью, прежде всего сгладить различия этих двух подходов и улучшить показатели среднего ожидаемого результата. Для всех представленных тестовых функций так и произошло, - случайного выбор оказался эффективнее худшего.
Повышение эффективности поиска при использовании случайного выбора операторов кроссовера повлияло на то, чтобы применить аналогичный подход при реализации процесса мутагенеза новых особей, однако в этом случае преимущество перед детерминированным подходом не так очевидно в силу традиционно малой вероятности мутации. В основном вероятность мутации составляет 0.001 - 0.01.
3.2 Выбор родительской пары
Первый подход самый простой - это случайный выбор родительской пары ("панмиксия"), когда обе особи, которые составят родительскую пару, случайным образом выбираются из
всей популяции, причем любая особь может стать членом нескольких пар. Несмотря на простоту, такой подход универсален для решения различных классов задач. Однако он достаточно критичен к численности популяции, поскольку эффективность алгоритма, реализующего такой подход, снижается с ростом численности популяции. Второй способ выбора особей в родительскую пару - так называемый селективный. Его суть состоит в том, что "родителями" могут стать только те особи, значение приспособленности которых не меньше среднего значения приспособленности по популяции, при равной вероятности таких кандидатов составить брачную пару. Такой подход обеспечивает более быструю сходимость алгоритма. Однако из-за быстрой сходимости селективный выбор родительской пары не подходит тогда, когда ставиться задача определения нескольких экстремумов, поскольку для таких задач алгоритм, как правило, быстро сходится к одному из решений. Кроме того, для некоторого класса задач со сложным ландшафтом приспособленности быстрая сходимость может превратиться в преждевременную сходимость к квазиоптимальному решению. Этот недостаток может быть отчасти компенсирован использованием подходящего механизма отбора, который бы "тормозил" слишком быструю сходимость алгоритма. Другие два способа формирования родительской пары, на которые хотелось бы обратить внимание, это инбридинг и аутбридинг. Оба эти метода построены на формировании пары на основе близкого и дальнего "родства" соответственно. Под "родством" здесь понимается расстояние между членами популяции как в смысле геометрического расстояния особей в пространстве параметров. В связи с этим будем различать генотипный и фенотипный (или географический) инбридинг и аутбридинг. Под инбридингом понимается такой метод, когда первый член пары выбирается случайно, а вторым с большей вероятностью будет максимально близкая к нему особь. Аутбридинг же, наоборот, формирует брачные пары из максимально далеких особей. Использование генетических инбридинга и аутбридинга оказалось более эффективным по сравнению с географическим для всех тестовых функций при различных параметрах алгоритма. Наиболее полезно применение обоих представленных методов для многоэкстремальных задач. Однако два этих способа по-разному влияют на поведение генетического алгоритма. Так инбридинг можно охарактеризовать свойством концентрации поиска в локальных узлах, что фактически приводит к разбиению популяции на отдельные локальные группы вокруг подозрительных на экстремум участков ландшафта, напротив аутбридинг как раз направлен на предупреждение сходимости алгоритма к уже найденным решениям, заставляя алгоритм просматривать новые, неисследованные области.
