

 Курсовая работа: Анализ режимов автоматического управления
Курсовая работа: Анализ режимов автоматического управления
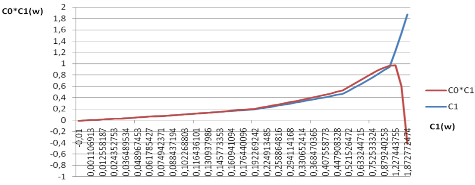
Рисунок 7. График зависимости С1С0 = f (C1) для ПИ - регулятора
Максимальное значение функции С1С0 = 0.07858 при С1 = 0.6919. Необходимо выбрать точку правее глобального максимума. Следовательно можно взять С1 = 0.7525, С1С0 = 0.748. В результате решения системы уравнений определяются оптимальные параметры настройки
![]() ,
, ![]()
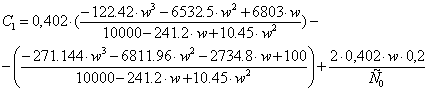
Оптимальные параметры настройки для ПИД - регулятора в соответствии с формулой (2.18)
 (2.18)
(2.18)
с учетом того, что α=0,1, определяются следующим образом:

Данные для построения графика зависимости С1С0=f (С1) для ПИД-регулятора приведены в таблице 2.
Таблица 2. Данные для определения параметров оптимальной настройки ПИД-регулятора
| w | C0 | C1 | C0*C1 |
| 0,01 | 0,003201 | 0,246648 | 0,00079 |
| 0,02 | 0,00648 | 0,249266 | 0,001615 |
| 0,03 | 0,009833 | 0,252096 | 0,002479 |
| 0,04 | 0,013258 | 0,255131 | 0,003382 |
| 0,05 | 0,016753 | 0,258366 | 0,004328 |
| 0,06 | 0,020317 | 0,261794 | 0,005319 |
| 0,07 | 0,023946 | 0,265412 | 0,006355 |
| 0,08 | 0,027638 | 0,269213 | 0,00744 |
| 0,09 | 0,031392 | 0,273194 | 0,008576 |
| 0,1 | 0,035204 | 0,277351 | 0,009764 |
| 0,12 | 0,042997 | 0,286175 | 0,012305 |
| 0,14 | 0,050998 | 0,295658 | 0,015078 |
| 0,16 | 0,059189 | 0,305773 | 0,018099 |
| 0,18 | 0,067553 | 0,3165 | 0,021381 |
| 0,2 | 0,076071 | 0,327819 | 0,024937 |
| 0,22 | 0,084723 | 0,339711 | 0,028782 |
| 0,24 | 0,093493 | 0,352162 | 0,032925 |
| 0,26 | 0,102362 | 0,365158 | 0,037378 |
| 0,28 | 0,11131 | 0,378686 | 0,042152 |
| 0,3 | 0,12032 | 0,392735 | 0,047254 |
| 0,32 | 0,129373 | 0,407295 | 0,052693 |
| 0,34 | 0,138449 | 0,422358 | 0,058475 |
| 0,36 | 0,147531 | 0,437916 | 0,064606 |
| 0,38 | 0,156599 | 0,453962 | 0,07109 |
| 0,4 | 0,165634 | 0,470491 | 0,077929 |
| 0,42 | 0,174618 | 0,487497 | 0,085126 |
| 0,45 | 0,187954 | 0,513891 | 0,096588 |
| 0,5 | 0, 209653 | 0,560216 | 0,117451 |
| 0,55 | 0,23043 | 0,609431 | 0,140431 |
| 0,6 | 0,249981 | 0,661528 | 0,165369 |
| 0,7 | 0,284179 | 0,774475 | 0,220089 |
| 0,8 | 0,309771 | 0,89959 | 0,278667 |
| 0,9 | 0,324242 | 1,038137 | 0,336607 |
| 1 | 0,325035 | 1, 192686 | 0,387665 |
| 1,2 | 0,275177 | 1,578054 | 0,434245 |
| 1,4 | 0,138978 | 2,34694 | 0,326173 |
| 1,5 | 0,0317 | 5,506128 | 0,174544 |
| 1,8 | -0,48041 | 1,932086 | -0,9282 |
| 2 | -1,00911 | 2,457965 | -2,48036 |
График зависимости С1С0=f (С1) для ПИД-регулятора приведен на рисунке 8
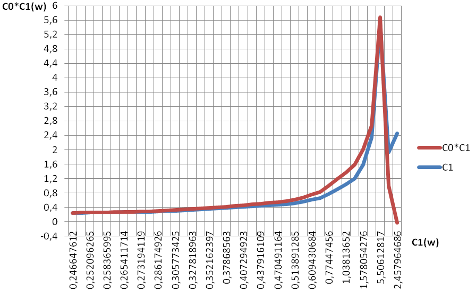
Рисунок 8. График зависимости С1С0 = f (C1) для ПИД - регулятора
Максимальное значение функции С1С0 = 0.4342 при С1 = 1.578. Необходимо выбрать точку правее глобального максимума. Следовательно можно взять С1 = 2.346, С1С0 = 0.326. В результате решения системы уравнений определяются оптимальные параметры настройки:
![]() ,
,
![]() ,
,
![]() .
.
В соответствии с заданием курсовой работы необходимо выполнить проверку рассчитанных параметров регуляторов в программах электронного моделирования. С помощью пакета Simulink программы MATLAB строится модель исследуемой системы с различными типами регуляторов и по виду переходной характеристики выбирается оптимальный регулятор.
Модель исследуемой системы без регуляторов (рис.9).
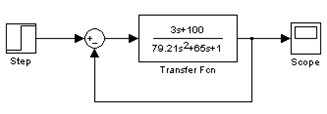
Рисунок 9. Модель системы без регулятора
Переходная система характеристики исследуемой модели приведена на рисунке 10.
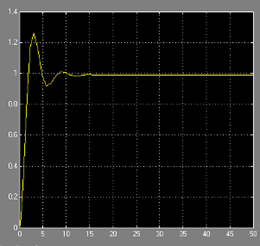
Рисунок 10. Переходная характеристика системы
Модель исследуемой системы с П-регулятором приведена на рисунке 11.
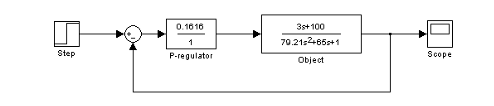
Рисунок 11 - Модель системы с П - регулятором
Переходная характеристика системы с П-регулятором приведена на рисунке 12.
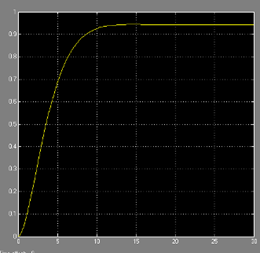
Рисунок 12. Переходная характеристика с П-регулятором
ПИ-регулятор можно представить как параллельное соединение пропорционального
и интегрирующего звеньев. Коэффициент передачи пропорционального звена в соответствии
с расчетом, приведенным выше, равен 0,752, коэффициент передачи интегрирующего звена
равен ![]() . Таким образом, модель исследуемой
системы с ПИ-регулятором приведена на рисунке 13.
. Таким образом, модель исследуемой
системы с ПИ-регулятором приведена на рисунке 13.
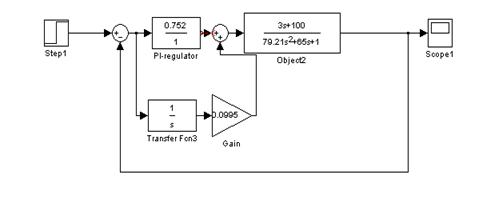
Рисунок 13. Модель системы с ПИ-регулятором
Переходная характеристика системы с ПИ-регулятором приведена на рисунке 14.
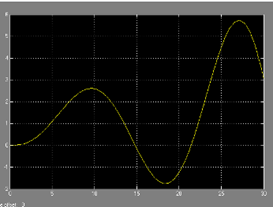
Рисунок 14. Переходная характеристика системы с ПИ-регулятором
ПИД-регулятор можно представить как параллельное соединение пропорционального,
интегрирующего и дифференцирующего звеньев. Коэффициент передачи пропорционального
звена в соответствии с расчетом, приведенным выше, равен 2.346, коэффициент передачи
интегрирующего звена равен ![]() , коэффициент передачи дифференцирующего
звена равен
, коэффициент передачи дифференцирующего
звена равен ![]() . Таким образом, модель исследуемой
системы с ПИД-регулятором приведена на рисунке 15.
. Таким образом, модель исследуемой
системы с ПИД-регулятором приведена на рисунке 15.
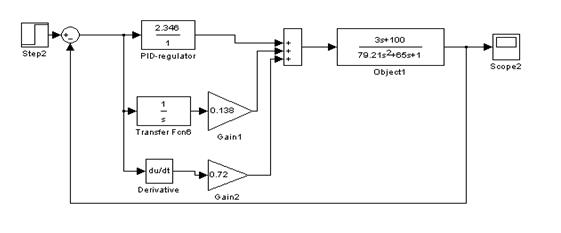
Рисунок 15. Модель системы с ПИД-регулятором
Переходная характеристика системы с ПИД-регулятором приведена на рисунке 16.
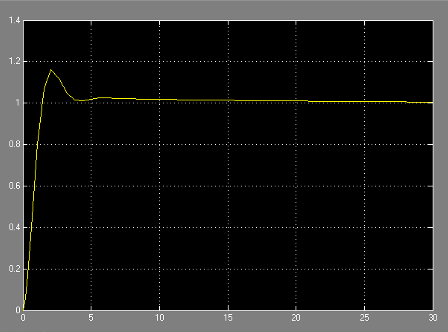
Рисунок 16. Переходная характеристика системы с ПИД-регулятором
Заключение
В ходе выполнения данной работы, исследования режимов автоматического управления построены: временные, логарифмические и фазовые характеристики.
Определены оптимальные параметры настройки П, ПИ, ПИД-регуляторов. На основании полученных характеристик можно сделать вывод, что для заданного объекта управления оптимальным является ПИД-регулятор (перерегулирование составляет менее 15%). При использовании П-регулятора наблюдается статическая ошибка, а при ПИ-регуляторе наблюдается расходящийся колебательный процесс.
Список литературы
1. Теория автоматического управления / Под ред. А.А. Воронова. - М.: ВШ, 1986г.
2. Г.А. Атамалян Приборы и методы измерения электрических величин. - М.: Дрофа, 2005г.
3. В.Ю. Шишмарев Автоматика. - М. ACADEMIA, 2005г.
4. Никулин В.А. Частотные методы анализа и синтеза теории автоматического управления. - 2-е изд., испр. и доп. - М.: Наука, 2000.
5. Лукас В.А. Теория автоматического управления. - 2 изд., перераб. и доп. - М.: Недра, 1990.
6. Баскаков С.И. Радиотехнические цепи и сигналы: Учеб. для вузов по спец. "Радиотехника". - 4-е изд., перераб. и доп. - М.: Высш. шк., 2003.
7. Шавров А.В., Коломнец А.П. Автоматика. - М.: Колос, 1999.
8. Загинайлов В.И., Шеповалова Л.Н. Основы автоматики. - М.: Колос, 2001
