

 Реферат: Имитационное биомеханическое моделирование как метод изучения двигательных действий человека
Реферат: Имитационное биомеханическое моделирование как метод изучения двигательных действий человека
2) в том случае, если моделируются движения, у которых отсутствуют быстрые изменения скоростей, например: бег на коньках, плавание, бег на лыжах, то при построении кинетограммы подобных локомоций на ЭВМ можно использовать гладкие функции типа полиномов: алгебраического или интерполяционного сплайна [29], сглаживающих сплайнов 3-й или 5-й степени.
Начало свободного проката (А)

Начало одноопорного отталкивания (Б)
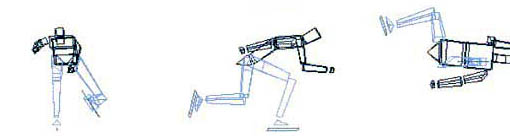
Начало двухопорного отталкивания (В)

Рис. 1. Базисные кинематические положения при моделировании бега на коньках
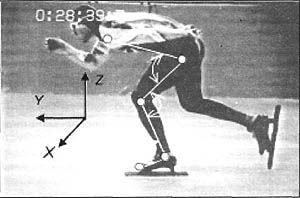
Рис. 2. Положительное направление моментов в суставах толчковой ноги
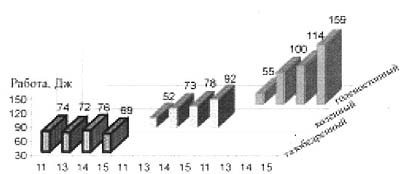
Рис. 3. Механическая работа в суставах толчковой ноги относительно оси X инерциального базиса при разной скорости бега на коньках
Необходимо отметить, что математические зависимости, описывающие кинематику модели (сплайны, тригонометрические полиномы), весьма чувствительны к способу задания начальных (базисных) кинематических данных и к краевым условиям [35]. Например, произвольность по времени между базисными точками может привести к тому, что кинетограмма модели станет существенно отличаться от реального движения.
Для того чтобы избежать искажения кинематики в имитационной модели перед ее созданием поступили следующим образом:
а) исследовали кинематику моделируемой локомоции (бег на коньках по прямой) с помощью видеорегистрирующей методики. Наличие исходных кинематических данных с дискретностью 40 мс (частота видеорежима PAL) дает возможность с приемлемой точностью определить кинематические параметры модели;
б) чтобы краевые условия не влияли на скорость и ускорение изучаемого движения, справа и слева от изучаемого цикла задавали дополнительно не менее трех фаз [41].
Трехмерная имитационная модель локомоций человека (на примере бега на коньках). Пространственная имитационная модель локомоций человека была реализована для бега на коньках по прямой. Уравнения модели, описывающие трехмерное движение звеньев тела, даны в [10]. Построение имитационной модели проходило в несколько этапов:
1. На первом этапе определили масс-инерционные характеристики сегментов тела конькобежца : массы, моменты инерции звеньев, положения центров масс и биомеханические длины звеньев [7, 9].
2. На втором этапе исследовали особенности движения конькобежца в двухопорной фазе. Для этого оценили величину поперечного смещения звеньев тела конькобежца, рассчитали центробежную силу, действующую на толчковый конек, и тем самым ввели ограничения на "разгрузку толчковой ноги" в двухопорной фазе. При расчете загрузки опорной ноги и моментов в суставах применяли уравнения из работы [5].
3. На третьем этапе определили аэродинамическое сопротивление сегментов тела конькобежца. Включение в модель аэродинамических сил необходимо, так как аэродинамическое сопротивление - основная тормозящая сила, действующая на конькобежцев. Коэффициенты аэродинамического сопротивления Сх для разных форм посадки конькобежцев в зависимости от скорости и вида бега: с руками или без рук, по прямой или по повороту - составили от 0,75 до 1,2 [8, 38]. Суммарная величина сопротивления воздуха для всего тела конькобежца (сила, приложенная к ОЦМ) в зависимости от формы посадки при скорости бега 15 м/c составляет 45-61 Н. Наибольшее воздействие силы аэродинамического сопротивления приходится на туловище - около 30% от суммарной силы. Аэродинамическое сопротивление голени и бедра ног не превышает 10 Н.
4. На четвертом этапе рассчитали кинематические характеристики имитационной модели бега на коньках. К ним относятся: длина шага, длительность фаз: свободного проката, одноопорного отталкивания и двухопорного отталкивания; средняя скорость по фазам, ширина "елочки", формы посадки конькобежцев.
Выше было сказано, что способ задания базисных точек кинетограммы существенно влияет на скорости и ускорения изучаемого движения и, значит, на результаты решения ОЗД. При моделировании бега на коньках для более точного задания линейных и угловых характеристик локомоций использовали данные видеосъемки конькобежцев. Перед тем как создать кинетограмму бега на ЭВМ, сначала методом биомеханической видеосьемки и компьютерных программ определяли углы, угловые скорости в суставах в трех положениях: в начале фазы "свободного проката" (рис. 1А); в начале одноопорного отталкивания (рис. 1Б); в начале двухопорного отталкивания (рис. 1В); в завершении двухопорного отталкивания (рис. 1Б).
Зная расстояние между масштабными метками на дорожке, определяли путь и среднюю скорость тазобедренного сустава (полюса модели) между базисными точками в продольном направлении.
Аналогичную последовательность в обработке кадров применяли и для видеоряда поперечных движений конькобежцев.
5. На пятом этапе в компьютерную модель включили данные по анатомическому строению мышц нижней конечности конькобежцев - точки крепления мышцы к костям, физиологический поперечник, длины мышечной и сухожильной частей, состав волокон; угол перистости [9].
6. На шестом этапе решали обратную задачу - определения динамики для 16-звенной пространственной модели тела человека.
Выходные параметры модели. В результате компьютерного моделирования бега на коньках определяли следующие биомеханические параметры:
а) управляющие (суставные) моменты;
б) механическую работу и мощность , развиваемую в суставах;
в) скорости 7 мышц нижней конечности и
г) силы тяги 7 мышц ноги.
Применение имитационного моделирования для определения биомеханических характеристик бега на коньках с рекордной скоростью. Продемонстрируем возможности метода имитационного моделирования с целью определения модельных динамических характеристик бега на коньках с рекордной скоростью. Для этого определили динамические и энергетические параметры, такие, как: а) механическая работа и б) мощность при различных скоростях бега, включая рекордную скорость 15 м/с.
Среднюю скорость бега в фазах, углы в суставах, фазовый состав движения определили на основе результатов биомеханического исследования темпо-ритмовых характеристик бега на прямой участников забегов на дистанциях 1500 и 5000 м зимних Олимпийских игр в Нагано и Солт-Лейк-Сити.
Механическая работа в зависимости от скорости бега. Моменты, направленные на разгибание в суставах (моменты относительно поперечных осей), придают ускоренное движение ОЦМ тела (рис. 2). Расчет механической работы в тазобедренном, коленном и голеностопном суставах толчковой ноги при разной скорости бега проводили в проекции на ось X инерциального базиса. Результаты расчетов представлены на рис. 3.
С увеличением скорости бега механическая работа в суставах не имеет однонаправленной тенденции к возрастанию. Так, работа в тазобедренном суставе почти не меняется - 74-69 Дж, в коленном - возрастает с 52 (V=11 м/с) до 92 Дж (V=15 м/с); а в голеностопном - увеличивается в 2,8 раза - с 55 (V=11 м/с) до 159 Дж (V=15 м/с).
Механическая мощность в суставах толчковой ноги. Помимо механической работы рассмотрим еще один показатель силовой активности мышц - мощность (также в проекции на ось X инерциального базиса). Мощность по своим составляющим: угловой скорости и моменту - в большей степени соответствует физиологическим особенностям функционирования мышцы, а именно зависимости "сила-скорость" . Увеличение скорости бега с 11 до 15 м/с меняет экстремум мощности в тазобедренном суставе на 24%. В коленном и голеностопном суставах с увеличением скорости бега максимальная мощность возрастет в два раза (рис. 4).
Заключение. Применили метод имитационного моделирования к задачам, связанным с изучением двигательной деятельности человека в экстремальных условиях. На примере бега на коньках с рекордной скоростью 15 м/с были определены "ведущие" суставы, в которых развивается максимальная мощность и совершается наибольшая механическая работа. Такими суставами являются коленный и голеностопный. С ростом скорости бега с 11 до 15 м/с механическая работа увеличивается в коленном суставе почти в два раза - с 52 до 92 Дж, в голеностопном - в три раза - с 55 до 159 Дж (см. рис. 3). Механическая суставная мощность - косвенный показатель напряженности мышечной работы - свидетельствует о том, что голеностопный сустав за счет шарнира между лезвием конька и ботинком становится ведущим суставом, обеспечивающим рост скорости бега до 15 м/с (см. рис. 4).
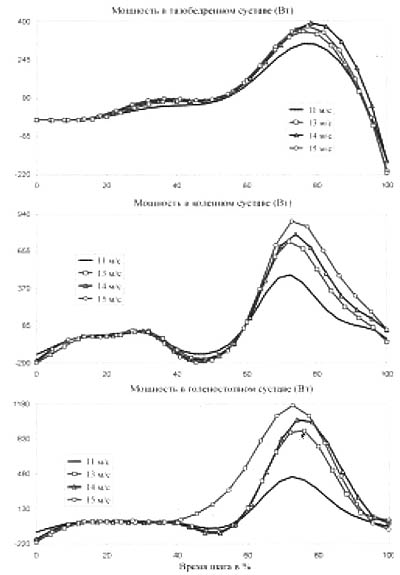
Рис. 4. Мощности разгибания в суставах толчковой ноги при разной скорости бега
Список литературы
1. Агапов Б.Т. Имитационное моделирование сократительной функции поперечно-полосатой сердечной мышцы: Автореф. докт. дисс. М., 1993.
2. Алешинский С.Ю. Результаты решения основной задачи биодинамики. - В кн.: Совершенствование управления системой подготовки спортсменов высшей квалификации. Биодинамика спортивной техники / Под ред. В.М. Зациорского. - М.: ГЦОЛИФК, 1978, с. 87-117.
3. Белецкий В.В. Двуногая ходьба: модельные задачи динамики и управления. - М.: Наука. 1984. - 288 с.
4. Бернштейн Н.А. О построении движений. - М.: Медгиз, 1947.- 252 с.
5. Воронов А.В., Лавровский Э.К. Моделирование на ЭВМ двухопорной фазы отталкивания конькобежцев на прямой // Теория и практика физ. культуры. 1989, № 2, с. 29-32.
6. Воронов А.В., Лавровский Э.К. О моделировании рациональных вариантов техники бега на коньках. - В кн.: Современные проблемы биомеханики, 1992, вып. 7, с. 144-163.
7. Воронов А.В., Селуянов В.Н., Чугунова Л.Г. Распределение массы тела конькобежцев разной квалификации // Конькобежный спорт: Ежегодник. - М.: ФиС, 1983, с. 43-44.
8. Воронов А.В., Юдин Г.В., Белякова З.Н. Исследование свойств обтекания и величины лобового сопротивления плохообтекаемого тела на примере спортсмена-конькобежца. - ВИМИ, депонированная рукопись, 23 декабря 1986 г., № Д07075, серия "СВ" выпуск 04 за 1986 г.
9. Воронов А.В. Анатомическое строение и биомеханические характеристики мышц и суставов нижней конечности. - М.: Физкультура, образование и наука, 2003. - 203 с.
10. Вукобратович М. Шагающие роботы и антропоморфные механизмы. - М.: Мир, 1976. - 541 с.
11. Вукобратович М., Стокич Д. Управление манипуляционными роботами: теория и приложения. - М.: Наука, 1985. - 384 с.
12. Загревский В.И. Программирование обучающей деятельности спортсменов на основе имитационного моделирования движений человека на ЭВМ: Автореф. докт. дисс. Томск, 1992.
13. Зинковский А.В., Макаров Н.В., Шолуха В.А. Компьютерный анализ адекватных моделей антропоморфных локомоций. - В кн.: Кибернетика и вычислительная техника, 1990, вып. 86б, с. 56-60.
14. Зинковский А.В., Шолуха В.А. Антропоморфные механизмы, моделирование, анализ и синтез движений: Учеб. пос. - Л.: СПбГТУ, 1992, 71 с.
15. Меделевич И.А. Стопа. - В кн.: Клиническая биомеханика. - Л.: Медицина, 1980, с. 82-106.
16. Новожилов И.В., Кручинин П.А., Копылов И.А. и др. Математическое моделирование сгибательно-разгибательных движений нижних конечностей при изменении вертикальной позы человека. - М.: Изд-во механико-математического факультета. 2001. - 52 с.
17. Прилуцкий Б.И., Зациорский В.М. Нахождение усилий мышц человека по заданному движению. - В сб.: Современные проблемы биомеханики. Вып. 7. Нижний Новгород, 1993, с. 81-123.
18. Соколов М.П. Конькобежный спорт. - М.: ФиС, 1955. - 339 c.
19. Третьяков В.П., Штарк М.Б., Шульман Е.И. и др. Принципы построения и функционирования проблемно-ориентированных программных систем автоматизации исследований в экспериментальной биологии на основе микроЭВМ и КАМАК //Автометрия, 1986, № 3, с. 3-22.
20. Уткин В.Л. Биомеханические аспекты спортивной тактики. М., 1984. - 128 с.
21. Фельдман А.Г. Центральные и рефлекторные механизмы управления движениями. - М.: Наука, 1979. - 184 с.
22. Формальский А.М. Перемещение антропоморфных механизмов. - М.: Наука, 1982. - 368 с.
23. Штоф В.А. Моделирование и философия. М.-Л., 1966. - 275 с.
24. ByoungHwa Ahn, Gye-San Lee, Bo-Yeo Kim. A mathematical modeling of the human upper extremity: an application of its model to the simulation of baseball pitching motion // Korean Journal of Sport Science, 1993, Vol. 5, p. 5-81.
25. Capozzo A. A general computing method for the analysis of human locomotion // Journal of Biomechanics, 1975, Vol. 18, p. 307-370.
26. Chow C.K., Jakobson D.H. Studies of human locomotion via optimal programming // Mathematical biosciences, 1971, Vol. 10, p. 239-306.
27. Dul J., Jonson G.E., Shiavi R., Townsend M.A. Muscular synergism - II. A minimum-fatigue criterion for load sharing between synergist muscles // Journal of Biomechanics, 1984b, Vol. 17, p. 675-684.
29. Dul J., Townsend M.A., Shiavi R., Jonson G.E. Muscular synergism - I. On criteria for load sharing between synergist muscles // Journal of Biomechanics, 1984a, Vol. 17, p. 663-673.
30. Dunfield D.L., Read J.F. Determination of reaction rates by using cubic spline interpolation // The Journal of Chemical Physics, 1972, Vol. 57, N 5, p. 2178-2183.
31. Hatze H. Myocybernetic control models of skeletal muscle. - University of south Africa, Muckleneuk, Pretoria, 1981. - 193 p.
32. Hemami H. Modelling, control, and simulation of human movement // CRC Critical Reviews in Biomedical Engineering, 1988, Vol. 13, Issue 1, p. 1-34.
33. Herzog W. Individual muscle force prediction in athletic movements. - PHD Thesis, 1985, The University of Calgary, p. 1-278.
34. Karpus W.J. The spectrum of mathematical modeling and systems simulation. - In: Simulation of systems, ed. L. Dekker, Delft, 1976, pp. 5-13.
35. Kedzior K., Zagrajek T. A biomechanical model of the human musculoskeletal system. - In Human and Mashine Locomotion, ed. A. Morecki and K.J. Waldron. Springer-Verlag Wien New York 1997, p. 125-153.
36. Laughlin T.M.Mc, Dillman C.J., Lardner T.J. Biomechanical analysis with cubic spline functions // Research Quarterly for Exercise and Sport, 1978, Vol. 48, N 3, p. 569-581.
37. Lumb J.R. Computer simulation of biological systems. - Molecular and Cellar Biochemistry, 1987, Vol. 73, p. 91-98.
38. Morecki A. Modeling and simulation and walking robot locomotion. - In Human and Mashine Locomotion, ed. A. Morecki and K.J. Waldron. Springe-Verlag Wien New York 1997, p. 1-79.
39. Schenau Ingen Van G.J., Bakker K.A. Energy cost of speed-skating and efficiency of work against air resistance // Journal of Biomechanics, 1976, Vol. 40, N 4, p. 584-4591.
40. Seyfarth A., Blickhan R., Van Leeuwen J.L. Optimum take-off techniques and muscle design for long jump // The Journal of Experimental Biology, 2000, Vol. 203, p. 741-750.
41. Voronov A.V., Lavrovsky E.K. Muscle force prediction model in speed-skating - International Society of Biomechanics XIV-th Congress, Paris, July 4-8, 1993, p. 1432-1433.
42. Voronov A.V., Lavrovsky E.K., Zatsiorsky V.M. Modelling of rational variants of the speed-skating technique // Journal of Sport Sciences, 1995, Vol. 13, N 2, april 1995, p. 153-170.
Для подготовки данной работы были использованы материалы с сайта http://lib.sportedu.ru/
